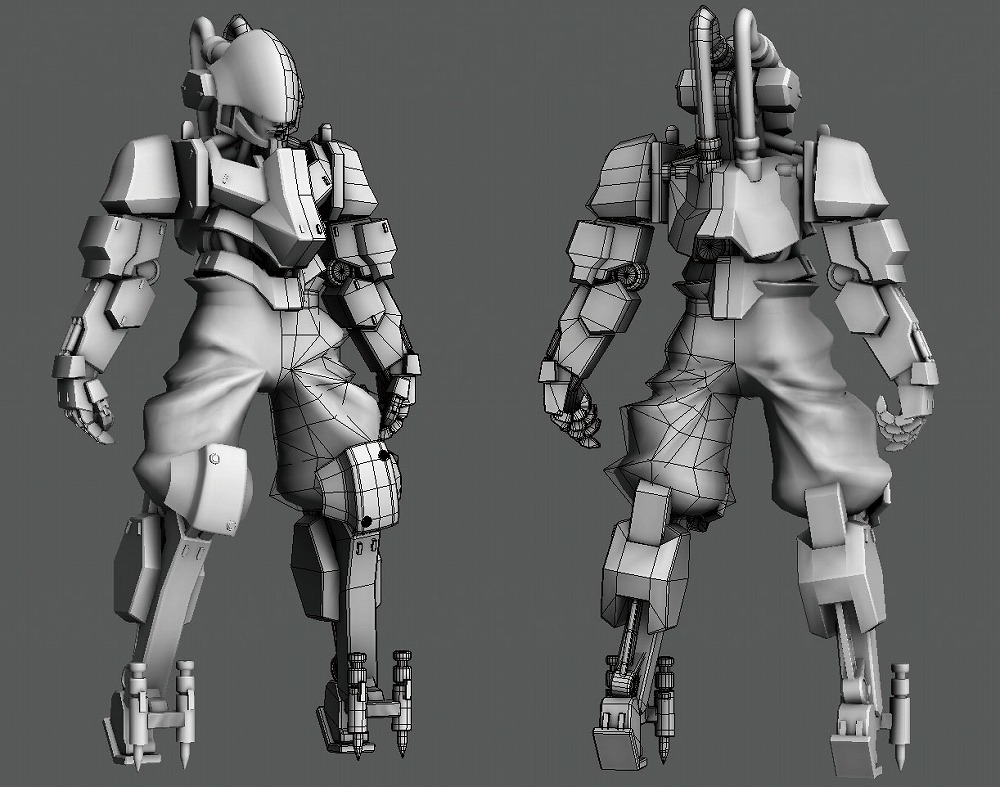
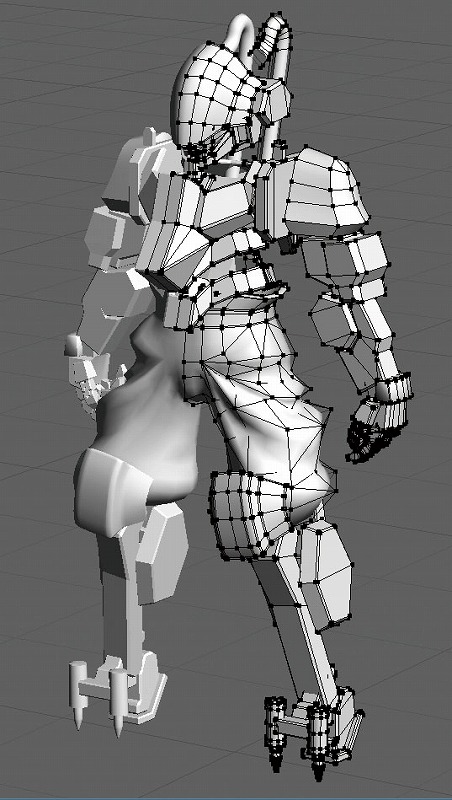
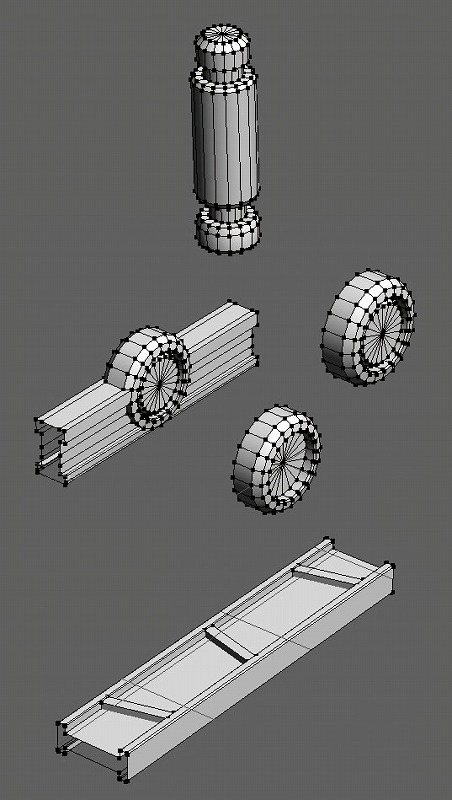
▲デザイン画をトレースして3Dモデルにした際にどうしても隙間ができてしまうので、内部構造を加味して、内側にある駆動系フレームがむき出しになるというディテールを追加することにしました。<左>は外観のカバーのみの状態です。間が埋まらないので、中身を作っていきます。<右>はフレーム用のパーツです。設定画は用意せず、作成したパーツをいくつか組み合わせて足りない部分を補うかたちにしています。
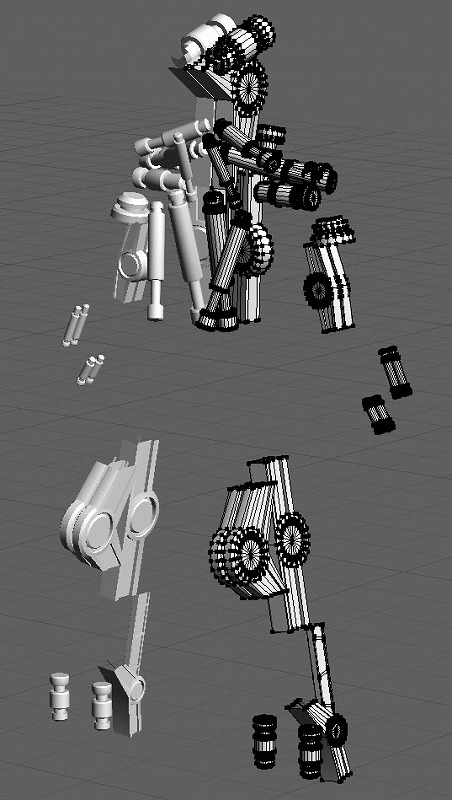

▲<左>はパーツを複製しながら、必要な部分に配置した状態です。余計な部分に配置せず、主にカバーからむき出しになっている関節の部分に配置しています。<右>は内部にフレームを入れた状態です。浮いたパーツがなくなり、現実感が増しているのがわかります
メカパーツを追加してディテールを上げるメカらしさを出すためには、細かなパーツを追加するのも有効です。ここではカバーにあたるパーツをフレームに固定する金具という設定で、面取り処理を施した小さな直方体や、ネジを想定した丸いパーツを配置しました。
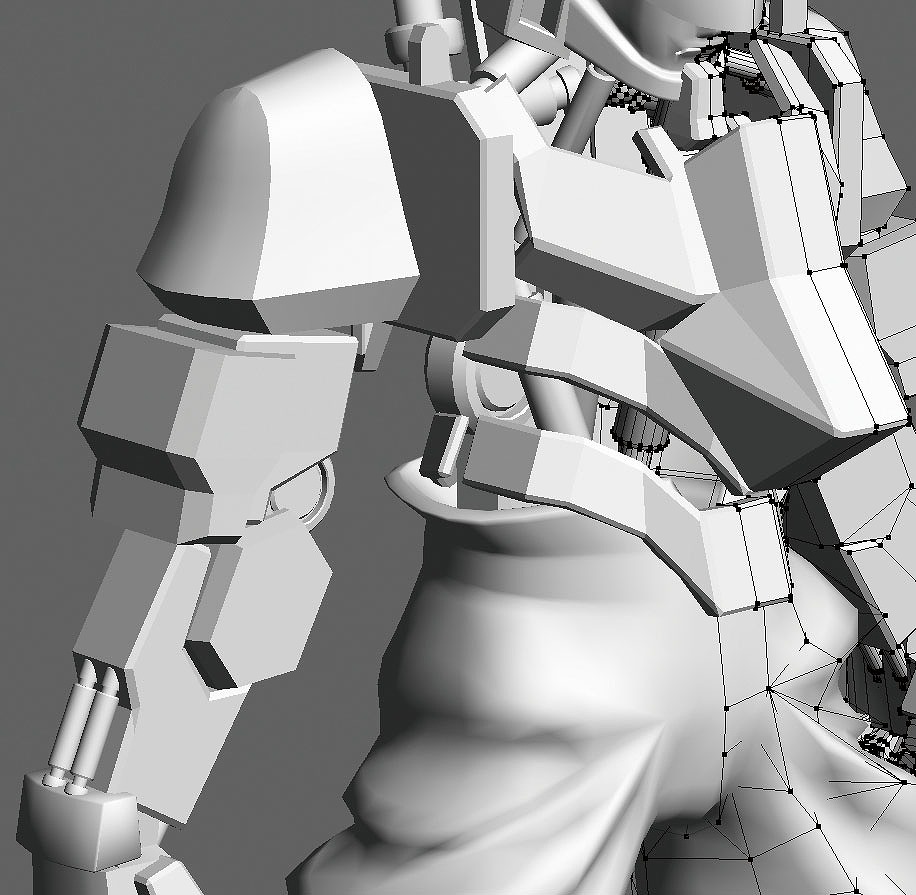
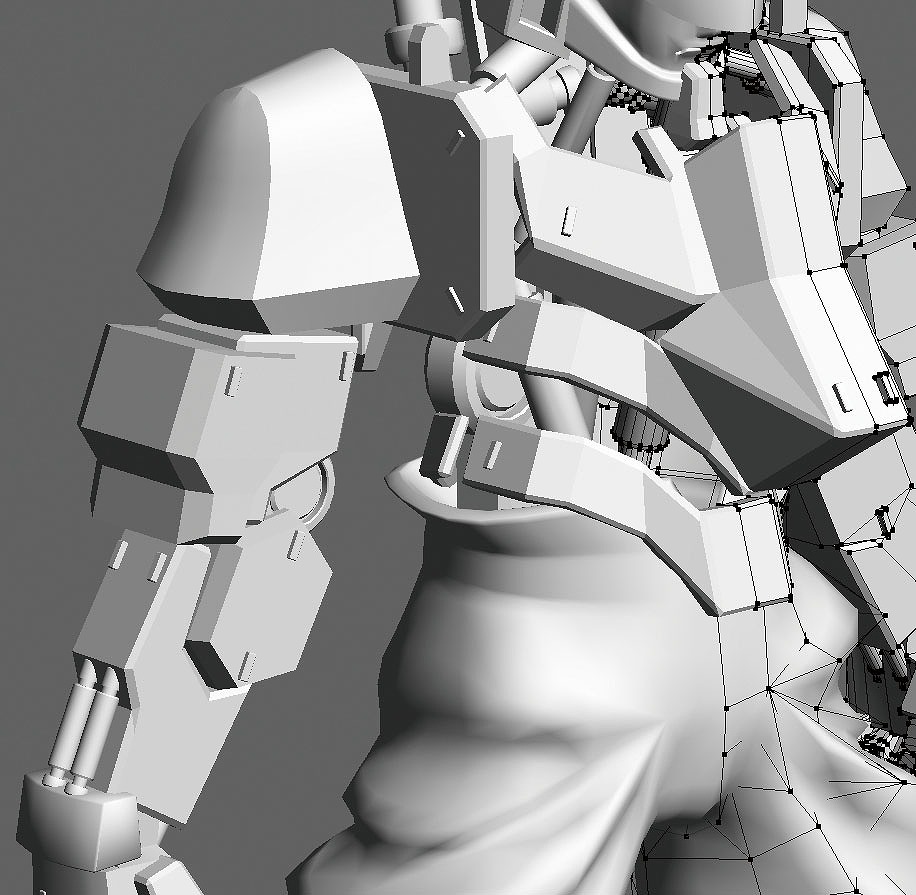
▲<左>はパーツを配置していない元の状態です。今回は等身大のロボなので、このままでも成立はします。<右>は直方体のパーツを配した状態です。カバーを留める金具ということを考え、なるべくカバーを固定できる位置に配置することを念頭に置きましょう。このように素材や組み立て方法などを考慮し、それに則したパーツを加えてあげることで現実味が増します
表情を付けやすい手の作成ロボットもので必ず作成するのが手(マニピュレータ)です。今回は巨大ロボではなく、あくまで等身大のロボということで、手先に表情が付くようなデザインにしました。特に手の甲は曲面にして丸みを入れることで指の並びが一直線にならず、より手の表情を付けやすくなります。
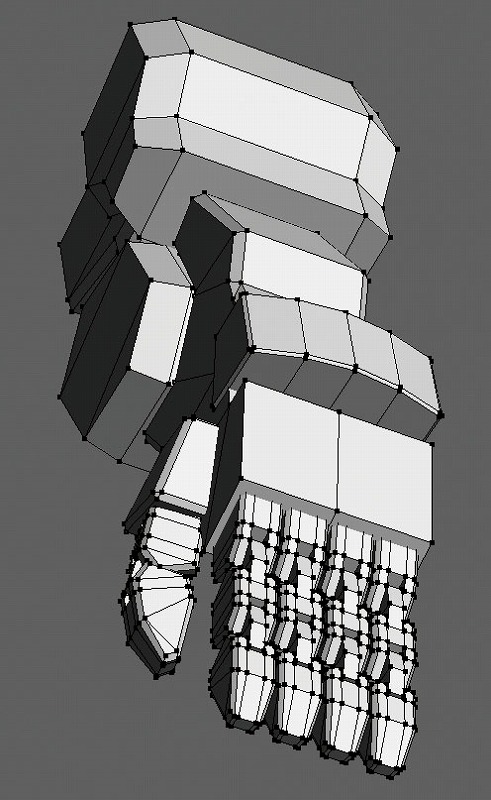
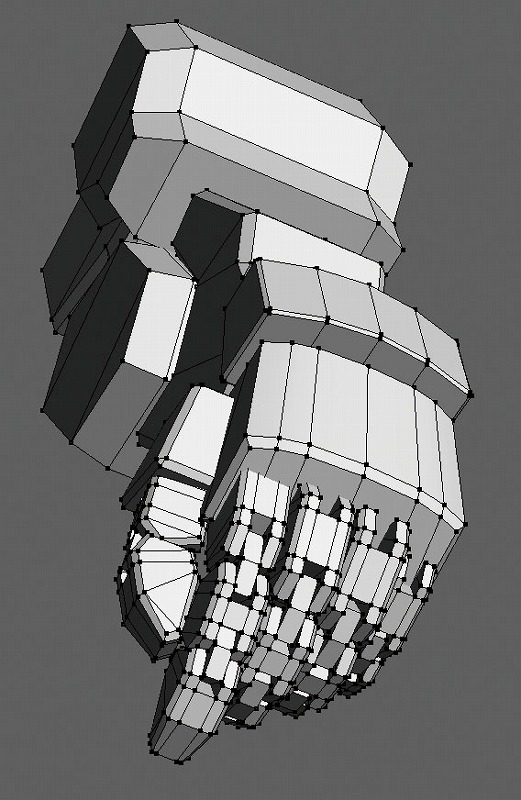
▲<左>手の甲を平らにした状態。指が直線的に並ぶため、指による手の表情が豊かになりません。ただ、この状態だと"ロボット感"が増すので、巨大ロボなどではあえてこのようにすることもあります。<右>手の甲を曲面にした状態。指が手のひらの方に寄るので、人間の手に近くなり、より手の表情が豊かになります
全体のバランスをとるコツ今回はトレースから立体化するということもあって、ポーズをとった状態でモデリングしています。ロボットは直立の状態だとカッコよさが伝わりにくく、全体のバランスもわかりづらいからです。ツールによってはポーズを付けたりデフォルトの状態に戻したりといったことが可能なので、気に入ったポージングをさせながら作業を進めると、必要となるつくり込みがわかりやすくなります。
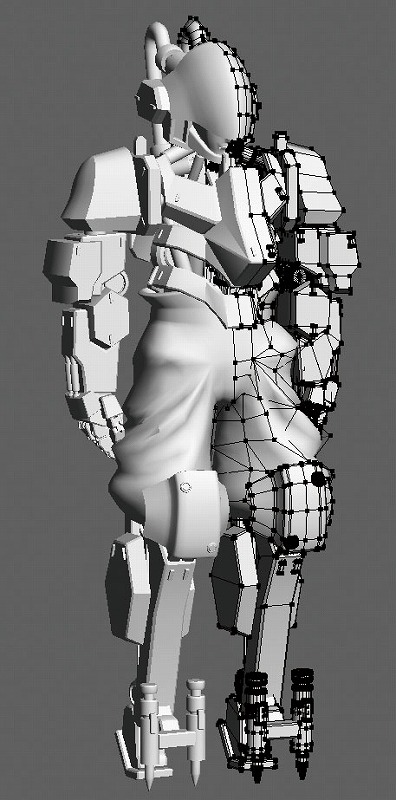
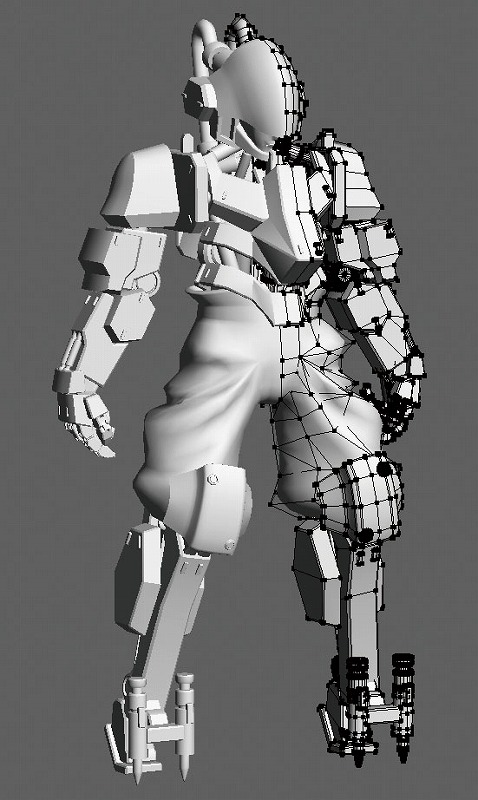
▲<左>直立した状態。作業はしやすいものの、カッコ良さはわかりにくいです。<右>ポーズが付いた状態。テンプレートにしたデザイン画と見比べながらの作業だったのでこのままつくり込みましたが、あえて斜めの状態で作業するのはある程度の慣れが必要になります
TEXT_オガワコウサク(チームグリグリ)