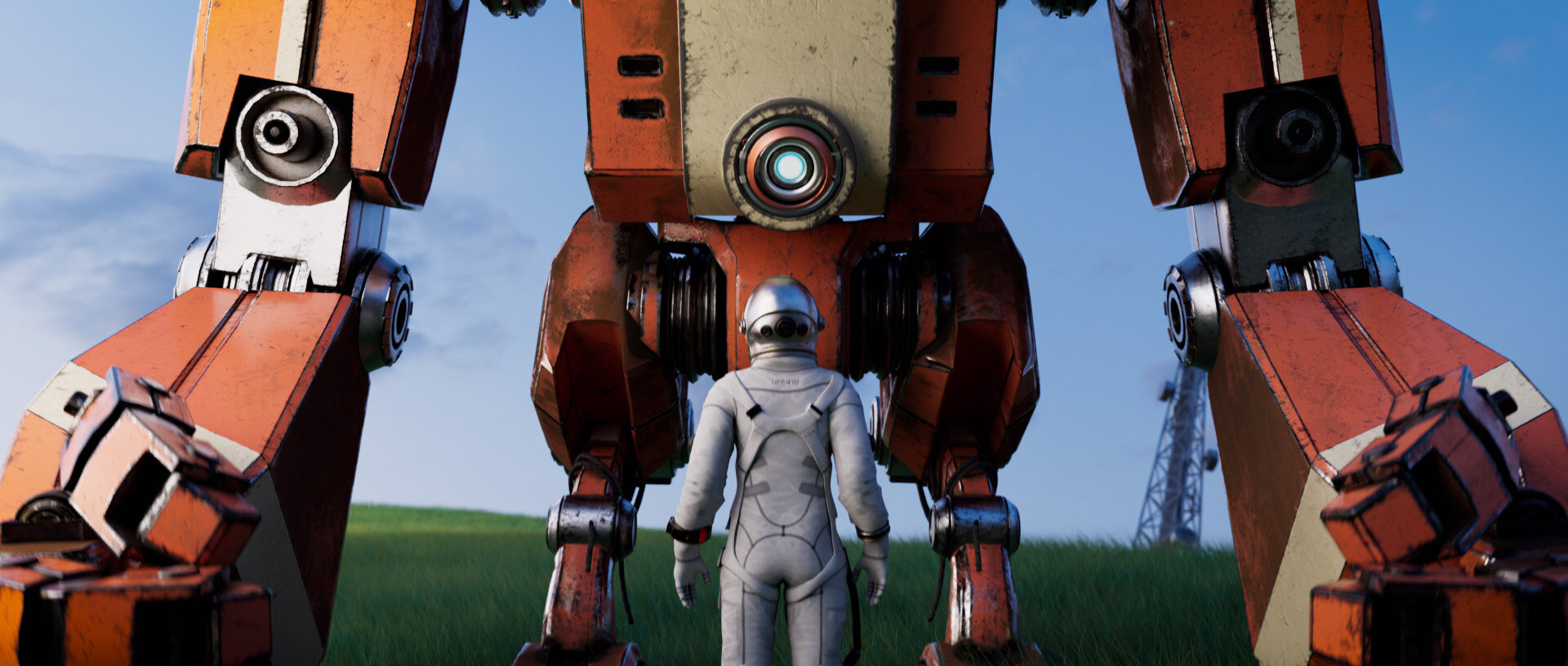
武蔵野美術大学 造形構想学部 映像学科の3年生6名が、共同制作をテーマにした講義の課題として作られたオリジナル短編アニメーション『A Small World in Your Hands』。日用品が巨大化したような不思議な世界を舞台に、宇宙飛行士のような出で立ちの主人公と小さなロボットが出会い、共に旅する姿をノンバーバルで描いた作品だ。
ふたりの共同監督がシーンごとに演出を分担。Houdini、Cinema 4D、さらにはBlenderとMayaなども交えた異種混成のパイプラインで仕上げられた本作は、『ショートショート フィルムフェスティバル & アジア 2026(SSFF & ASIA 2026)』のU-25プロジェクトに選出された。6週間という限られた期間でどのようなチームワークを実践したのか、CGアニメーションを手がけた5名に、その舞台裏を聞いた。
一緒にディレクションしましたー https://t.co/LAkfYHFlbq
— Takuto Ito (@ta36prcmps) February 1, 2026
CGアニメーションに魅了された6人が集う
——まずは皆さんの自己紹介と、本プロジェクトで担当されたことを教えてください。
共同監督・伊藤拓翔(以下、伊藤):
武蔵野美術大学 造形構想学部 映像学科3年の伊藤拓翔(いとう たくと)です。『A Small World in Your Hands』は、僕たちが履修した講義の課題として制作したものです。だから、全員が同級生です。
本作では山田くんと共同監督を務め、作品全体の進行と脚本、企画、ライティング、カメラ周りを担当しました。
共同監督・山田竜聖(以下、山田):
山田竜聖(やまだ りゅうせい)です。共同監督として、世界観の構築とビジュアルデベロップメント、そしてショットワークを主に担当しました。
向後恵梨(以下、向後):
向後恵梨(こうご えり)です。本作ではロボットのモデリングとリギング、そしてアニメーションを担当しました。
ジュ・ヨンドン(以下、ジュ):
ジュ・ヨンドン(朱 煐暾)です。今回は、背景モデリングと一部シーンのレイアウトを担当しました。
松本幸大(以下、松本):
松本幸大(まつもとこうだい)です。本作では主人公のキャラクターアニメーションと、前半に登場する4足歩行ロボットのベースリグなどを担当しました。
——授業の課題として制作されたとのことですが、演習みたいなものですか?
伊藤:
アニメーションをはじめ複数の領域を組み合わせ、チーム制作を経験することを目的とした授業です。
そのため作品テーマの指定は特になく、5~6人でチームを組んで制作を進め、毎回の授業で進捗を発表しながらレビューを重ね、ブラッシュアップしていくかたちでした。ちなみに僕たちが履修した2025年度は全部で3チームあって、ほかの2チームはいずれも2Dアニメーションでした。
——なるほど。表現手法も2Dと3DどちらもOKなんですね。皆さんのチームは、どのようにメンバーが集まったのですか?
山田:
もともと授業とは別に、松本さん、伊藤さん、本作の音楽を担当した高橋 廉さん、そして僕の4人で「SF系の作品を作りたいね」と、以前から構想を練っていました。
ただ4人だと人手が足りないなと思っていたところ、別の授業でロボット系の課題を制作していた向後さんに声をかけました。さらにこの授業を履修していたジュさんが僕たちの企画を見て参加を希望してくれて、この6人が集まりました。

-

向後恵梨/Eri Kogo
X:@kogoeriCG -

ジュ・ヨンドン/Joo Youngdon
Instagram:@ydon_1010
-

松本幸大/Kodai Matsumoto
X:@Matsumoto_c
日用品を巨大化することで、独自の世界観を構築
——作品を観て、確かな個性をもった世界観が印象的でした。
山田:
ありがとうございます。制作で一番こだわったのがビジュアルです。
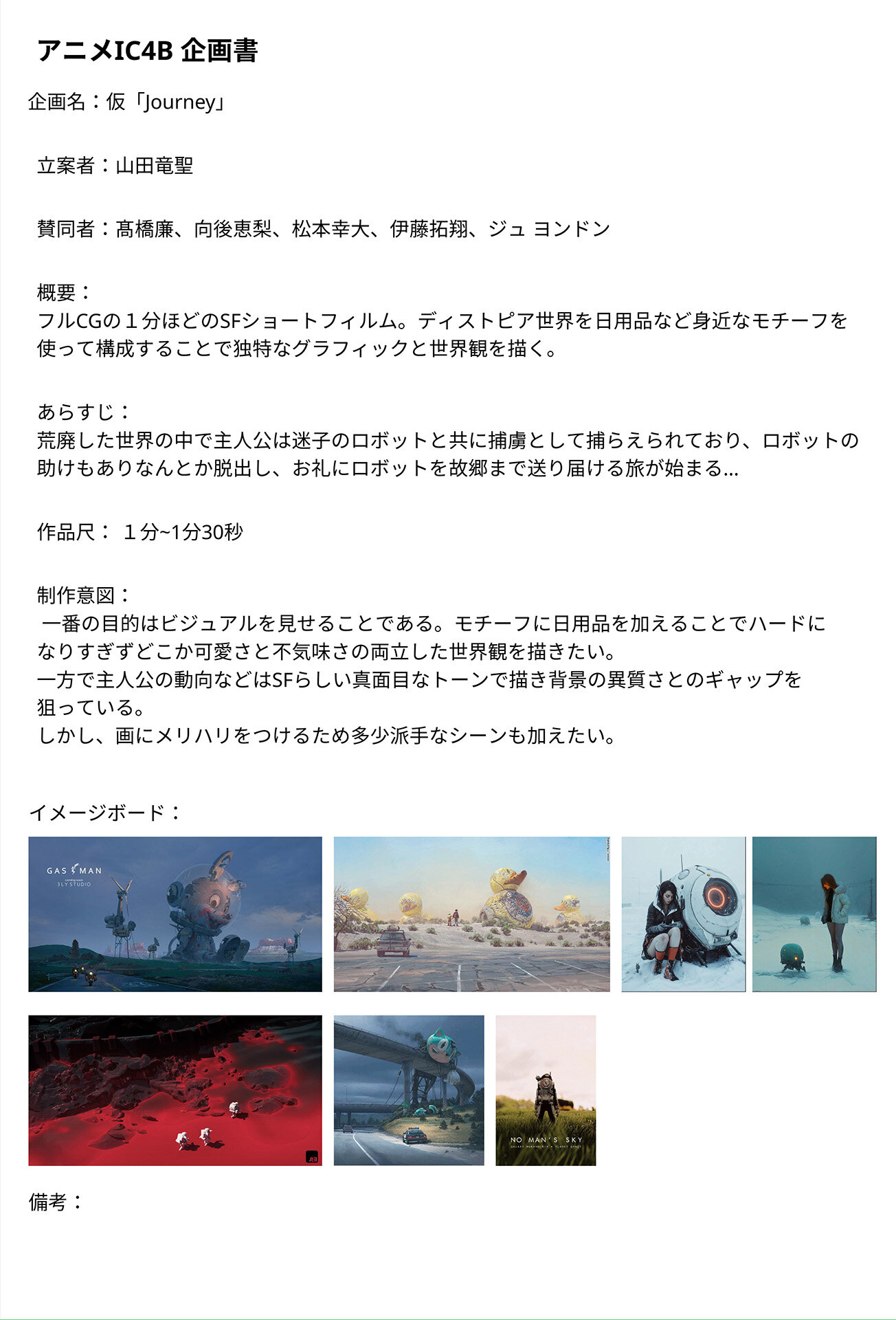
実は舞台は地球なのですが、世界観はほぼファンタジーです。地球上の未知なるエリアを探索するために派遣されたロボットたちが、その地に棲み着いてしまい、人間の暮らしに憧れを抱くようになる。その結果、人間の暮らしを象徴する巨大な日用品を建造するようになった……というものが骨子です。
ジャンルとしてはSFになるかもしれませんが、どこか可愛らしさのある世界観を目指しました。
伊藤:
一方、ストーリーはショートフィルムなのでわかりやすくシンプルな構成にしました。
未知のエリアに棲み着いたロボットに囚われていた主人公が、同じく囚われの身だった小型ロボットと共に脱出し、最後にはそのロボットの本当の姿に出会うというものです。
——巨大な日用品というアイデアは、どうやって生まれたものですか?
山田:
シモン・ストーレンハーグ/Simon Stålenhagという、僕が好きなスウェーデンのデジタル・アーティストの作品にインスピレーションを得ました。
彼のアートはレトロフィーチャー調で、自然や都市景観の中に巨大な建造物が描かれているものなどが特徴です。そこからアイデアをふくらませて、本来は手に持てるサイズの日用品が巨大なオブジェクトとして存在するビジュアルにたどり着きました。
伊藤:
企画段階で最初に決まったのが、山田くんが考えたこのビジュアルコンセプトでした。そこに自分のやってみたいストーリーや表現を織り混ぜていく感じで、一緒に構成を考えていきました。
——共同監督として、おふたりの役割分担はどのように?
伊藤:
世界観を山田くんが、脚本を僕が担当しました。その上で、ビデオコンテの段階から山田くんが演出するパートと、僕が演出するパートを同時並行で制作していきました。
山田くんが担当したのは世界観を見せることがメインのシーンで、僕はそれ以外の全体的なストーリーを描くシーンを担当するという分け方です。
山田:
1分14秒あたりに登場する、巨大なホーロー製マグカップをバックに小型ロボットを胸に抱えた主人公が歩くサイドショットから連続する4カットのディレクションを僕が担当しました。
——ビデオコンテの段階から、使用ツールも分かれていましたか?
伊藤:
その通りです。山田くんはCinema 4D、僕はHoudiniがメインツールなので、それぞれでビデオコンテを作成し、ショットワークも分業しました。最終的にはAfter Effectsによる編集&コンポジット作業で、ひとつのシークエンスにまとめています。
レンダラはCinema 4DパートにはRedshift。HoudiniパートにはKarmaを使いました。制作期間が6週間とわりとタイトだったので、各人が使い慣れているソフトと手法で進めることで、なるべく画づくりに集中できるようにしました。
僕の担当カットです。
— YAMADA (@ryma2357) February 1, 2026
1枚目のコンテナの住居のデザインは友人に手伝ってもらいました。#c4d #redshift #shortflim pic.twitter.com/0wHm3Y439W
ベースコンセプトを背景デザインへと落とし込む
——ここからは3DCGワークを担われたお三方に、具体的な作業内容を伺います。まずジュさんは、どんなきっかけで3DCG制作を始められたのですか?
ジュ:
私は元々、2Dアニメーションを学んでいました。ですがゲーム好きなこともあり、ゲームなどの3D背景制作に興味を持つようになりました。
そこでBlenderを使って独学で3DCGを始め、大学の授業でもCG関連の履修を増やしていくなかでこのチームと出会いました。
——どのシーンの背景を担当されましたか?
ジュ:
前半に描かれる主人公たちがコンテナ内に閉じ込められているシーンの背景モデル作成とレイアウト。あとは、山田さんが演出されたパートに登場する、先ほど話題に上ったサイドショットと、巨大な壁の前を主人公が歩くカットの背景モデルとレイアウトを担当させてもらいました。
山田:
巨大な壁のカットは、画面を構成する要素のアイデアはあったものの、どのように描くのが正解か、上手く言語化できずに困っていました。
そこでジュさんに相談したところ、「このエリアの文明を支える巨大ロボットの生産基地」という僕のアイデアをふくらませてくれて、爆速で仕上げてくれました。
ジュ:
実は、山田さんたちの企画発表を授業で見た直後から「自分にできそうな仕事は何だろう?」と考えていました。
そこで指針となりそうな世界観だけでも先に作っておこうと、自主的にモデリングに着手していたんです。それが運よく山田さんや伊藤さんが考えていたイメージにマッチしたので、すぐに提示することができました。
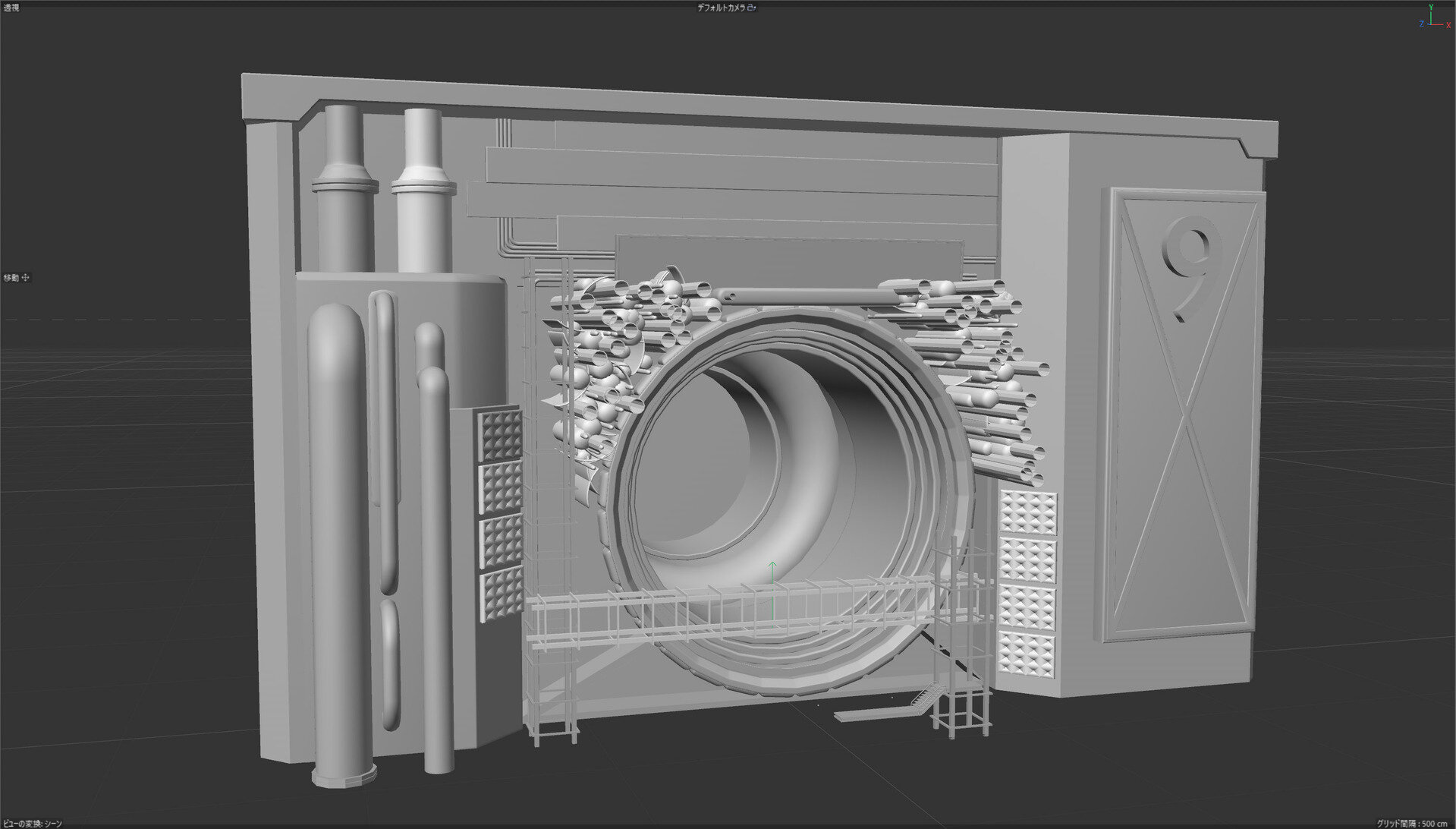
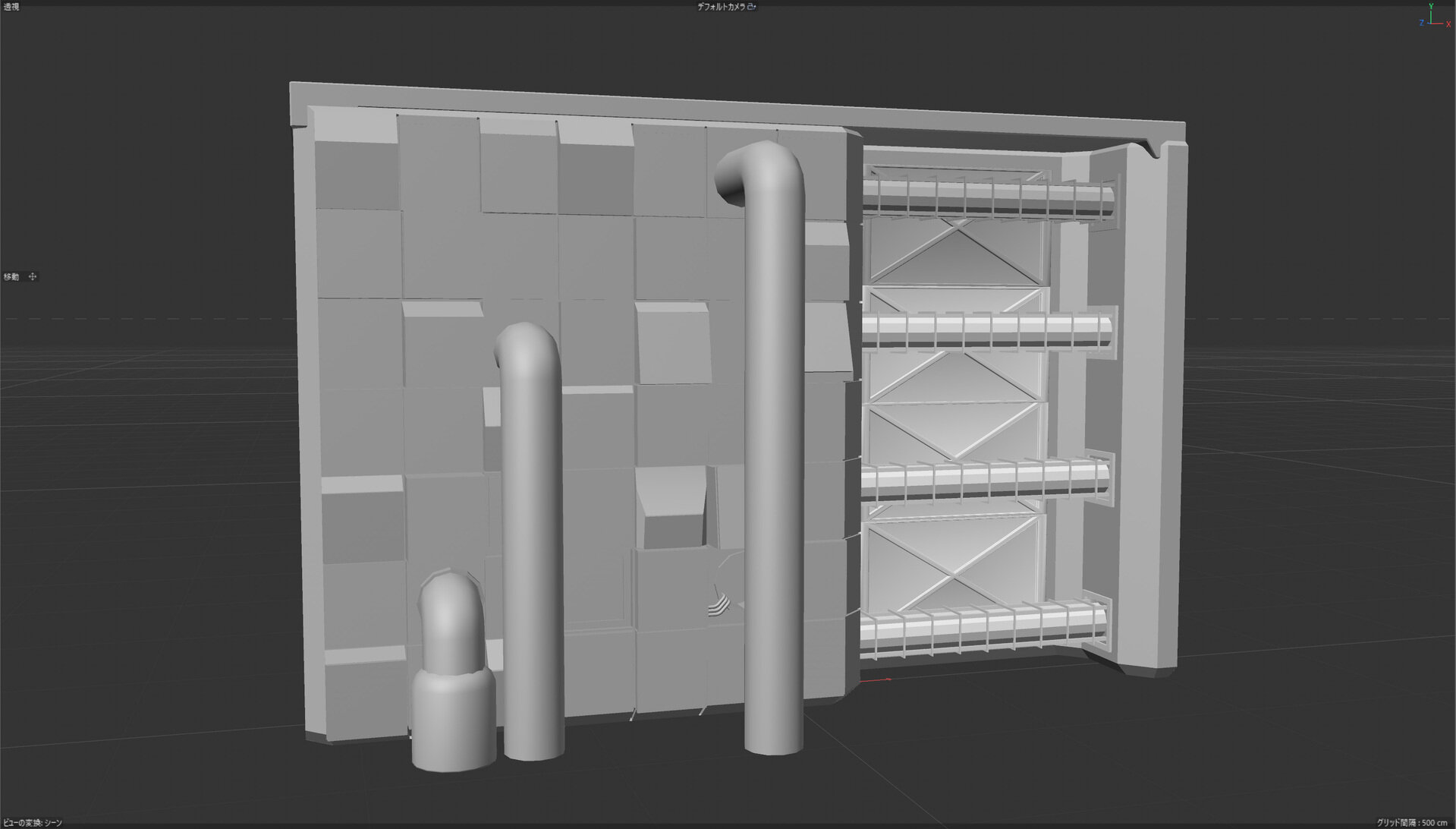
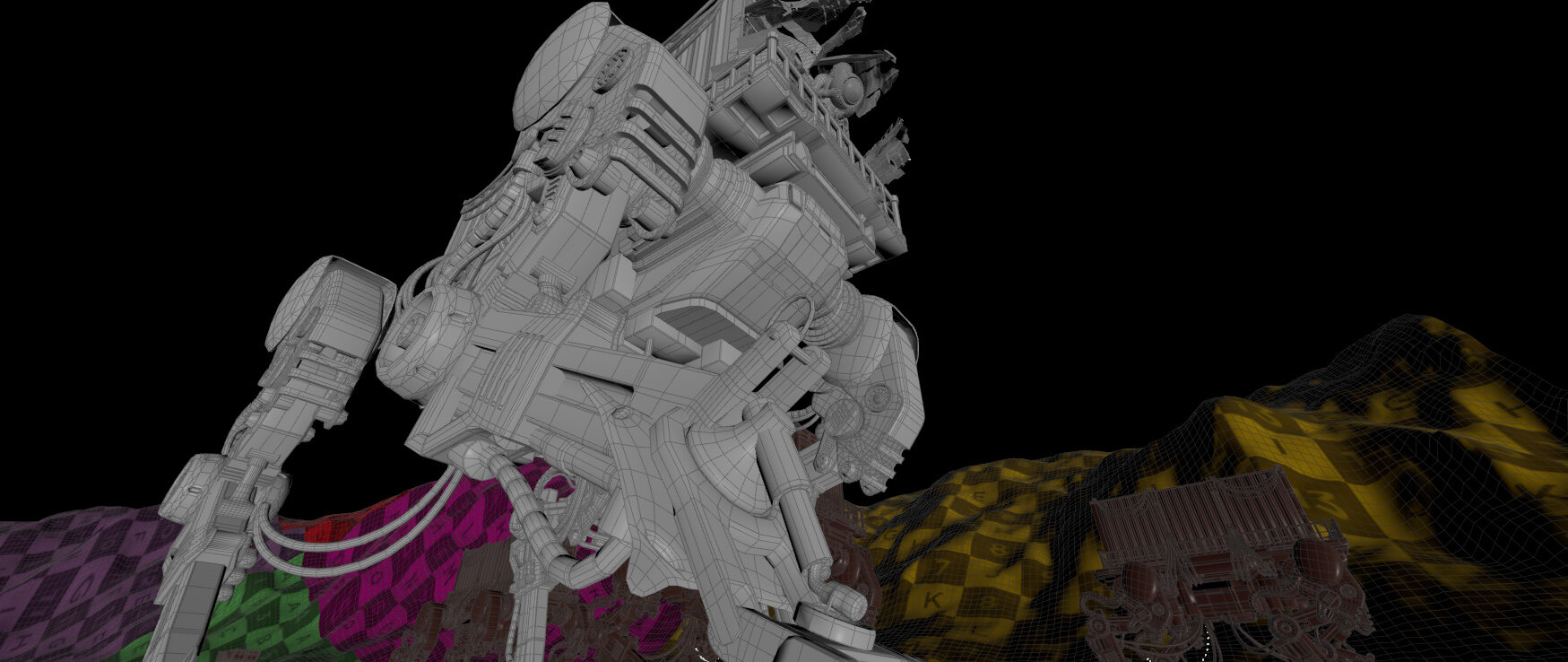
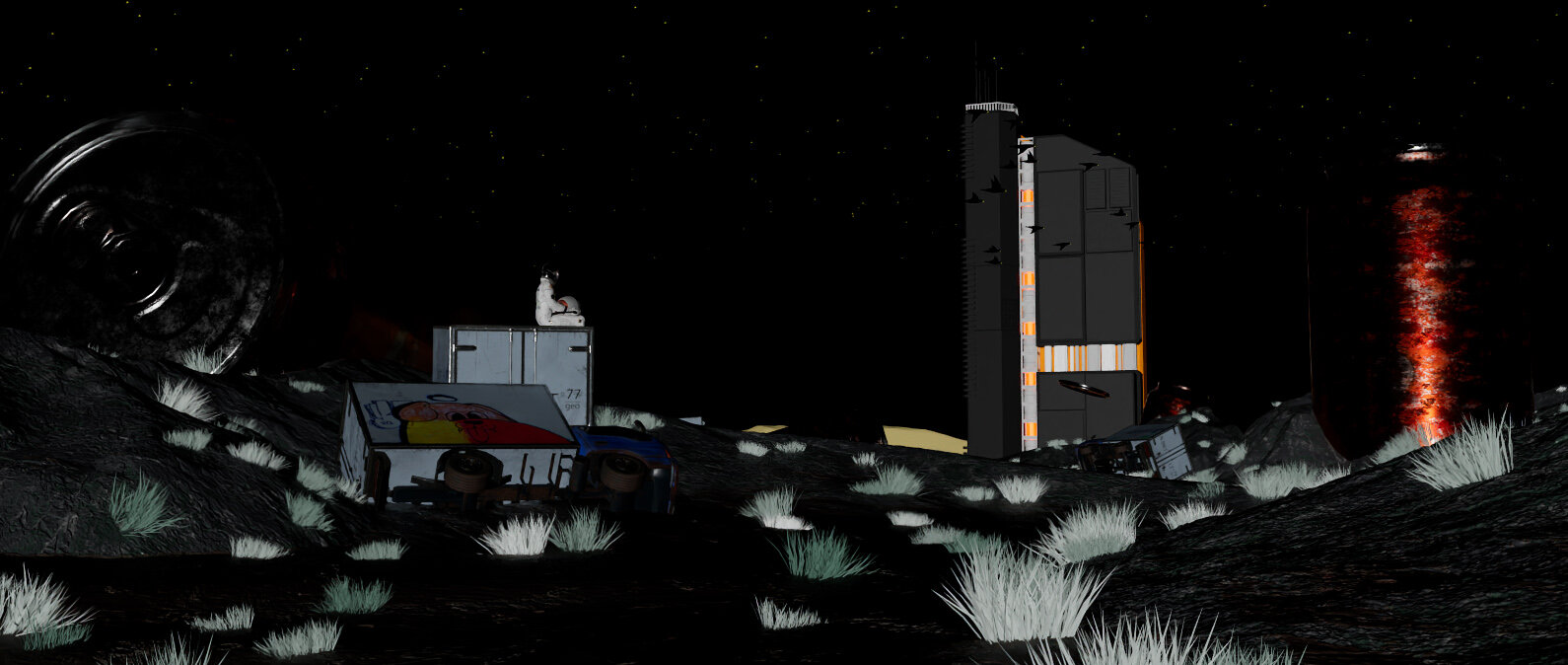
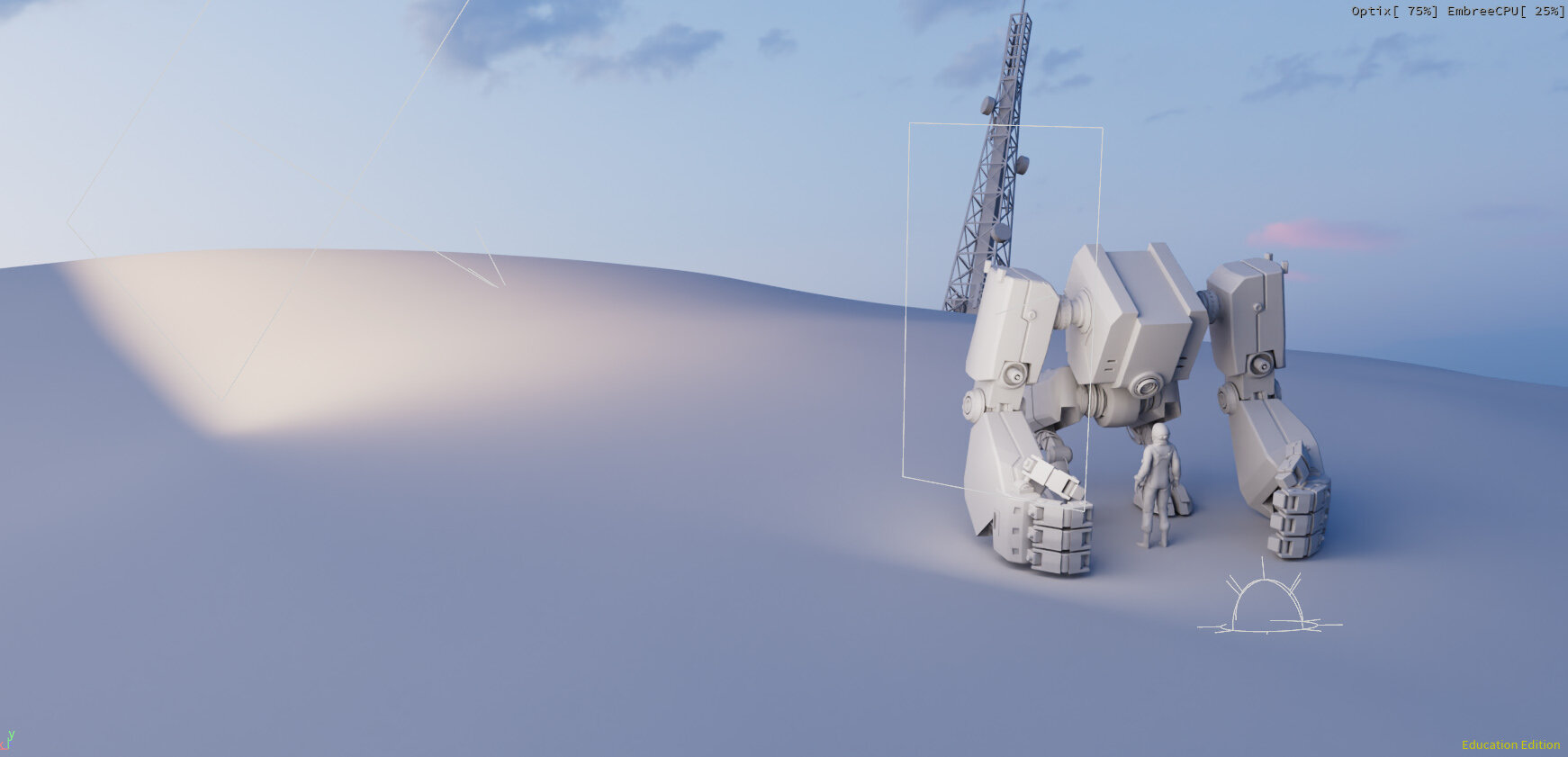
▲ ジュさんが担当した巨大な壁のモデル。「モデリングを始める際、一番先に決めるべきだと考えたのは『何に使われるか?』でした。画面内の多くを占めるオブジェクトになるので、単なる壁ではなく観た人が作品の世界観をつかみやすくするべく、ディテールに生産基地ぽさを込めるようにしました」
——このカットは、壁面の巨大な穴がインパクトありますね。
ジュ:
「この世界では、ロボットが文明の中心にいる」と考えて、その文明を支える巨大ロボットの生産基地とはどのような場所なのか、と具体的なデザインを考えていきました。
壁面の穴の奥から完成したロボットが搬出される、周辺に張り巡らされた無数のパイプは巨大ロボットを製造する過程で必要になる燃料の注入や細かなパーツの組み立て作業を担っている、といった設定で、それらをモデルやレイアウトに反映していきました。
——テクスチャなどの質感設定もジュさんが担当されましたか?
ジュ:
私が担当したのは、背景モデリングと一部カットのレイアウトのみです。質感設定などの画づくりは、山田さんと伊藤さんにおまかせしました。
制作時は、UV展開などのスキルが不十分だったので、本作の制作を通して「テクスチャによって、モデルの雰囲気がどのように変わりのか」といった感覚を、監督たちの実作業を通して体感することができました。参加できてとても良い勉強になりました。
キャラクターアニメーションで、ロボットに命を吹き込む
——向後さんは、どんなきっかけで3DCG制作を始めたのですか?
向後:
1年生の頃は、ギターばかり弾いていました(笑)
2年生のときに履修した3DCG系の授業でMayaを初めて触り、それがすごく楽しかったのが原点です。そこからMayaとBlenderを並行して学びつつ現在に至ります。
——本作ではロボットのモデリングとアニメーションを担当されたそうですね。
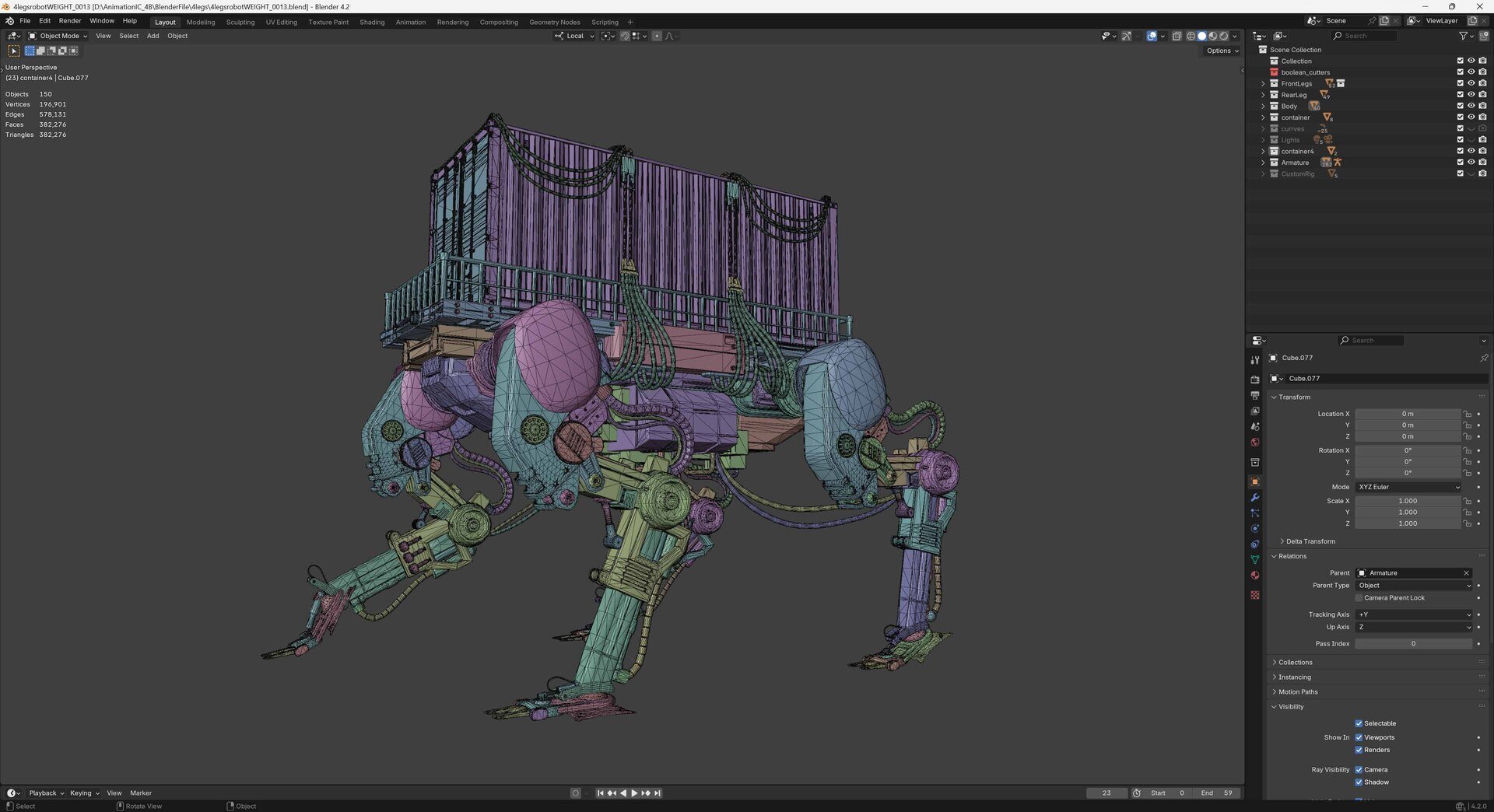
向後:
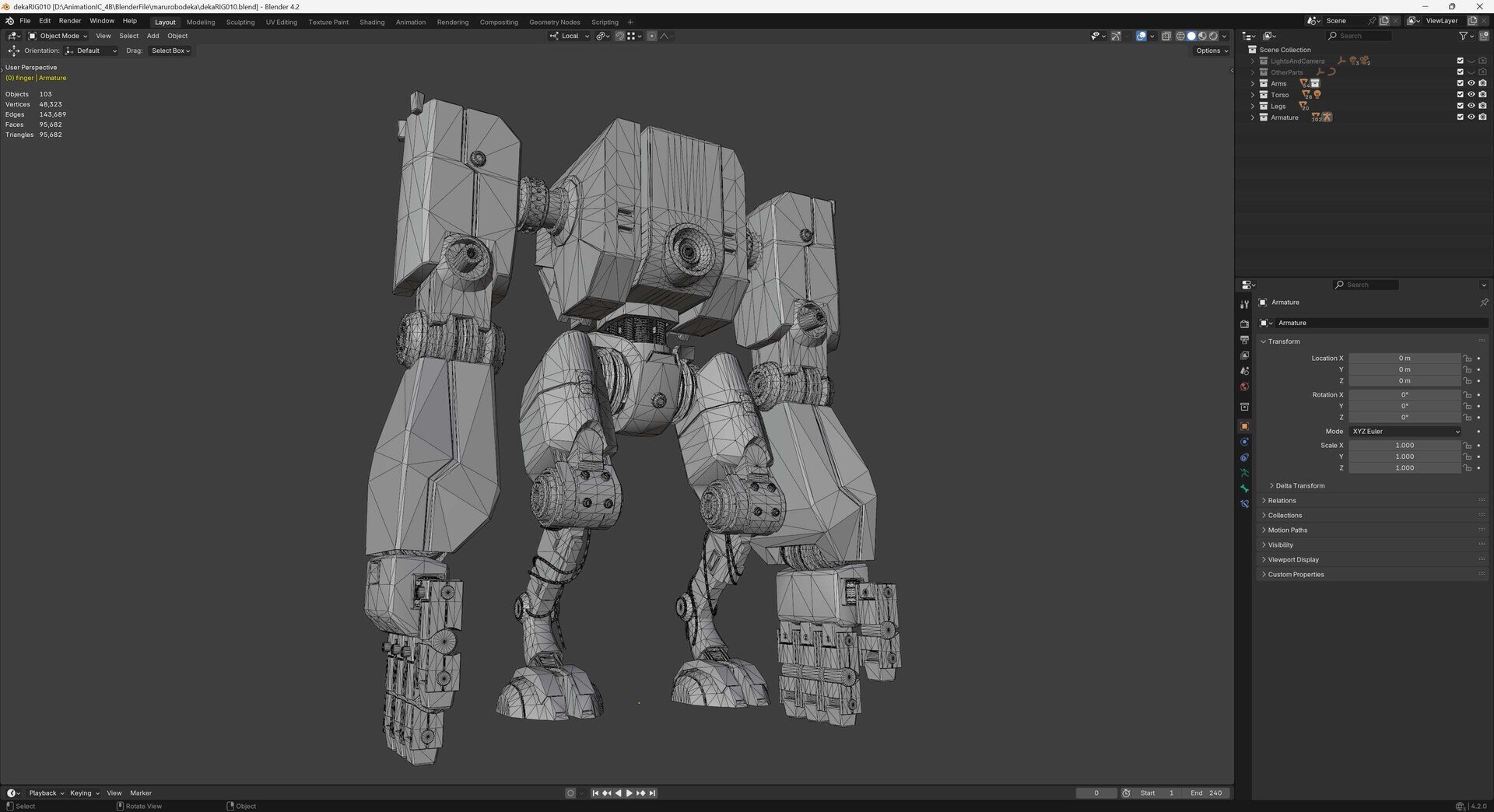
前半に登場する4足歩行メカは、最初に伊藤さんからコンセプトアートのようなイメージを渡されていたので、それを下地にリファレンス画像をたくさん集め、自分が「かっこいい」と思える要素を取り入れながらモデリングしていきました。
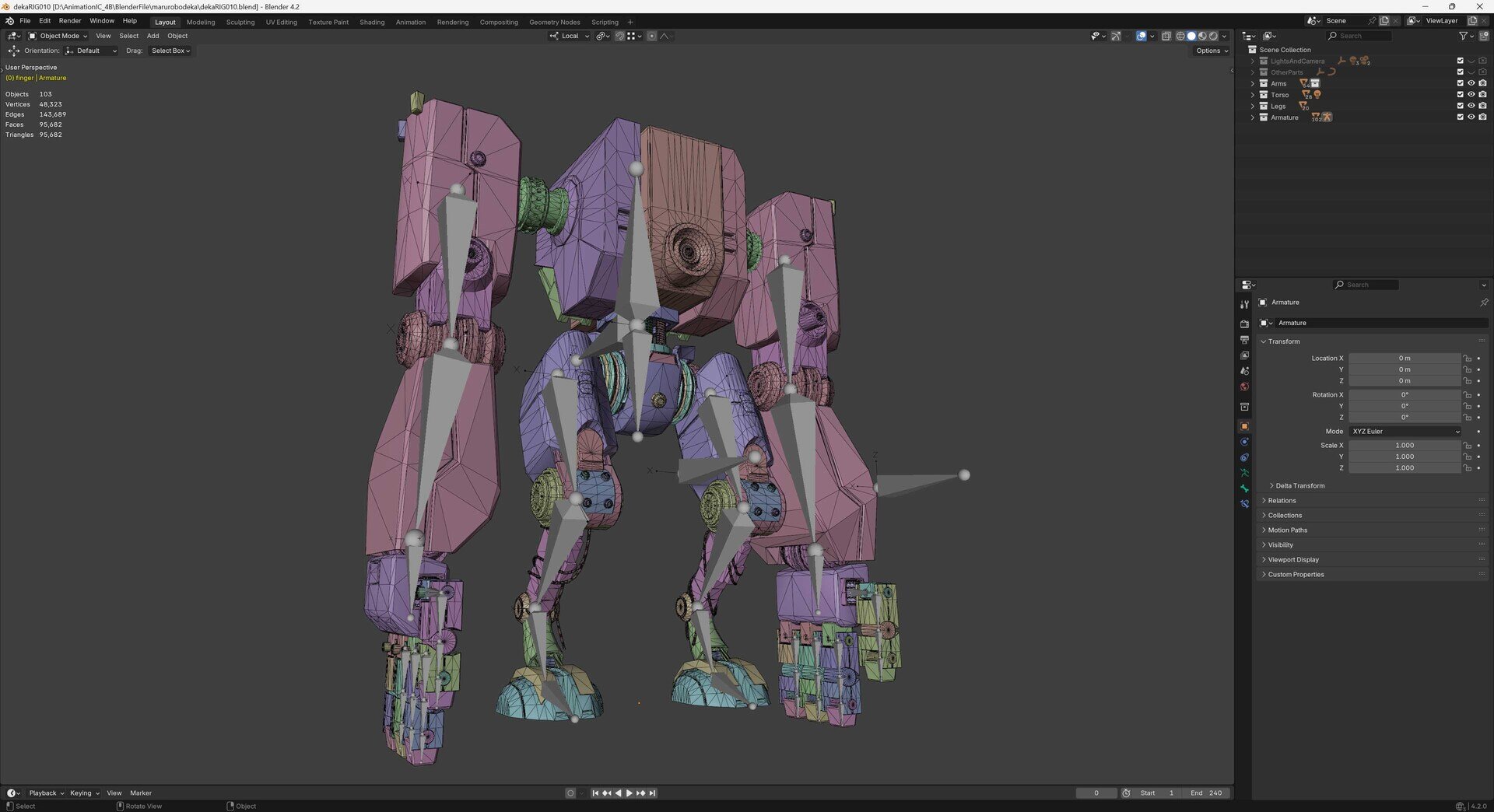
——ラストに登場する小型ロボットの本体の方はいかがでしたか?
向後:
こちらは伊藤さんがラフな形状をモデリングしてくれていたので、その形を崩さないように気をつけながらディテールを詰めていきました。動かしたときに破綻しない構造になるよう、機構を意識しながらモデリングすることを心がけました。
-
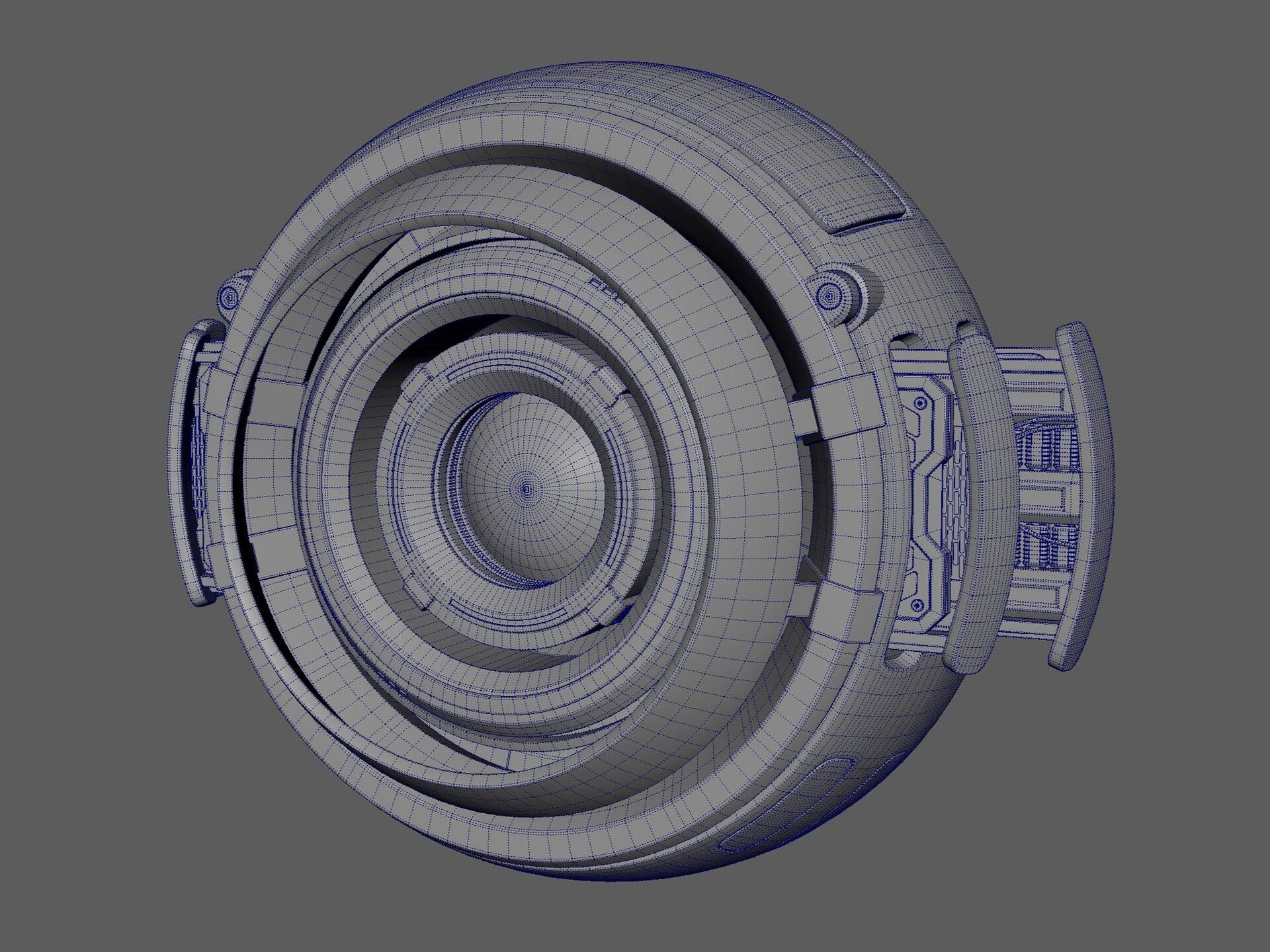
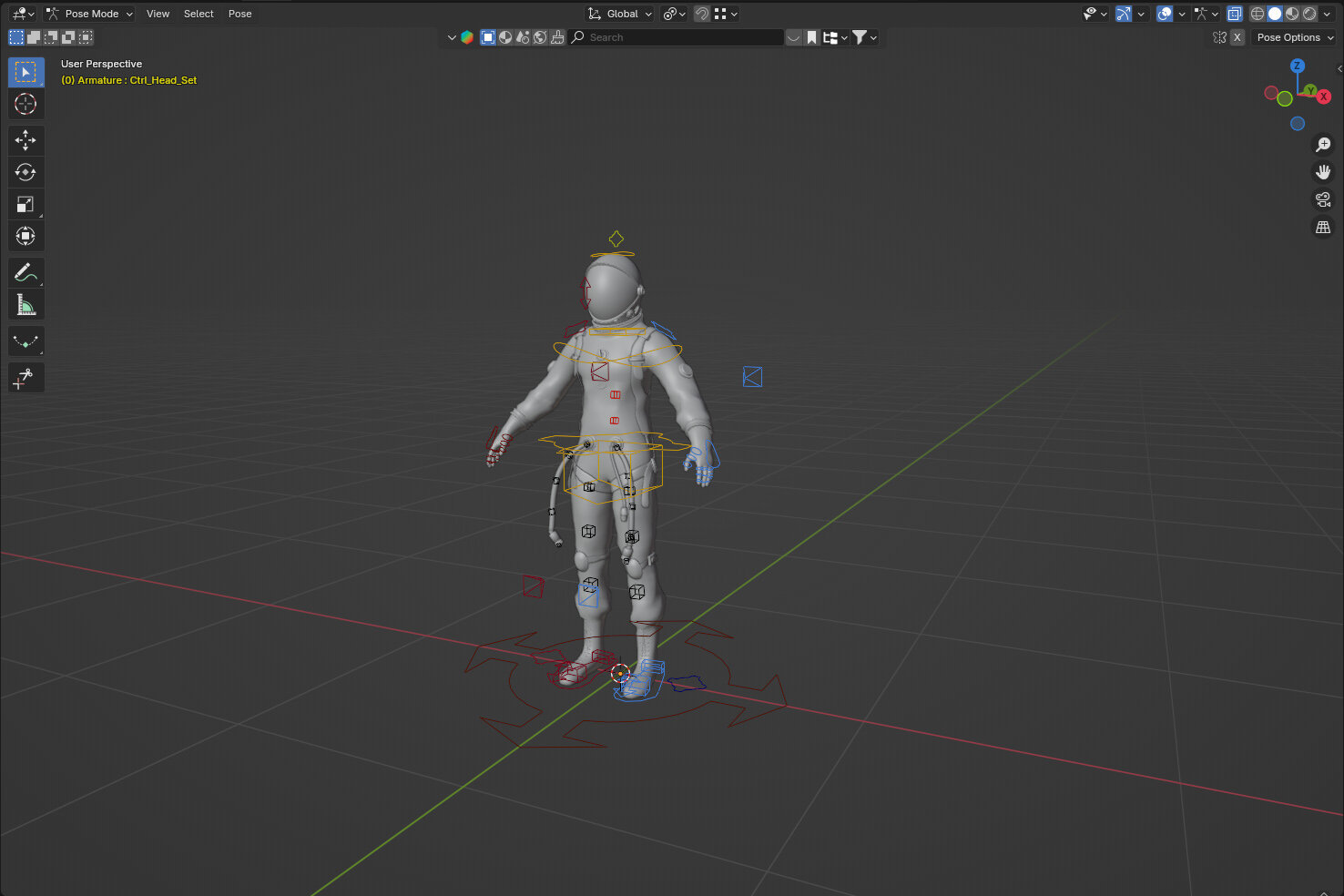
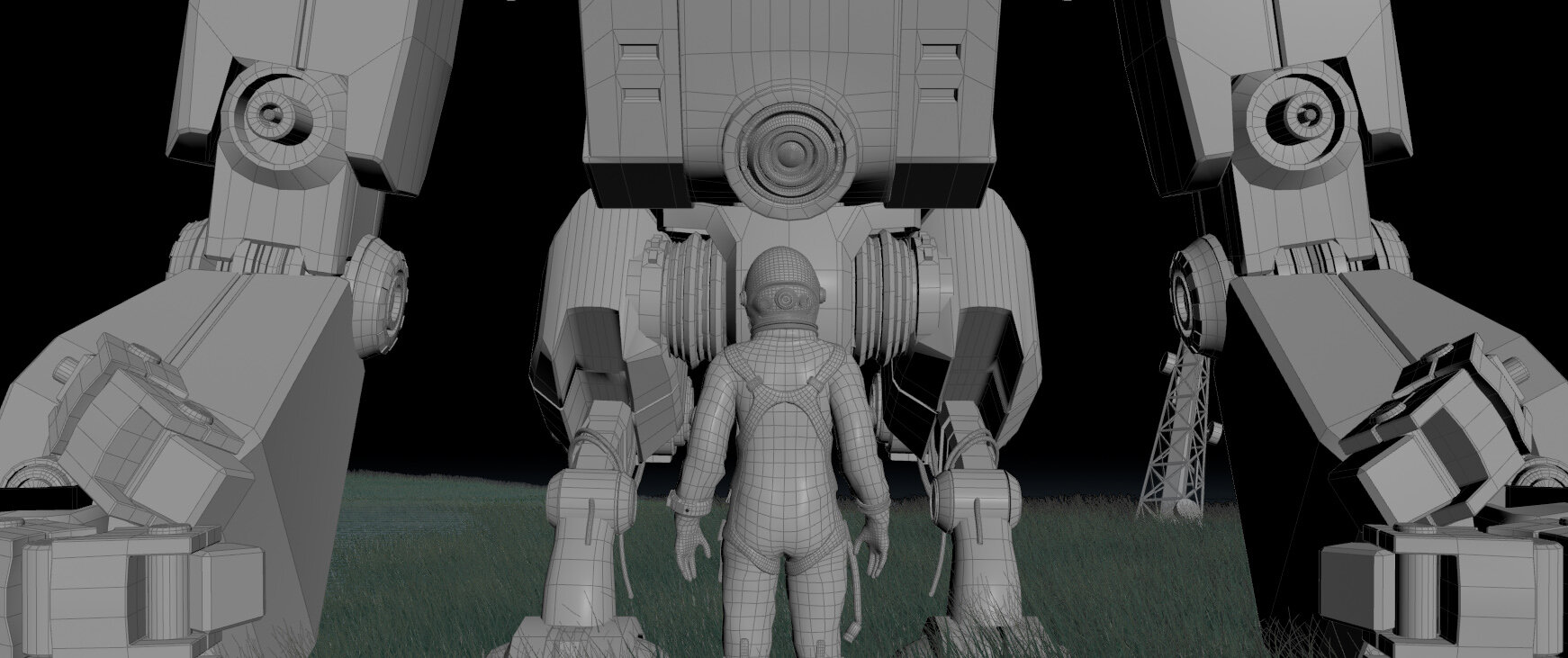
▲ 小型ロボットの完成モデル(メッシュ表示)。手足や口のないキャラクターだが、目を二重構造にしたり、側面に可動部を設置することによって、アニメーションにおける感情表現の幅が広がるように工夫したという -
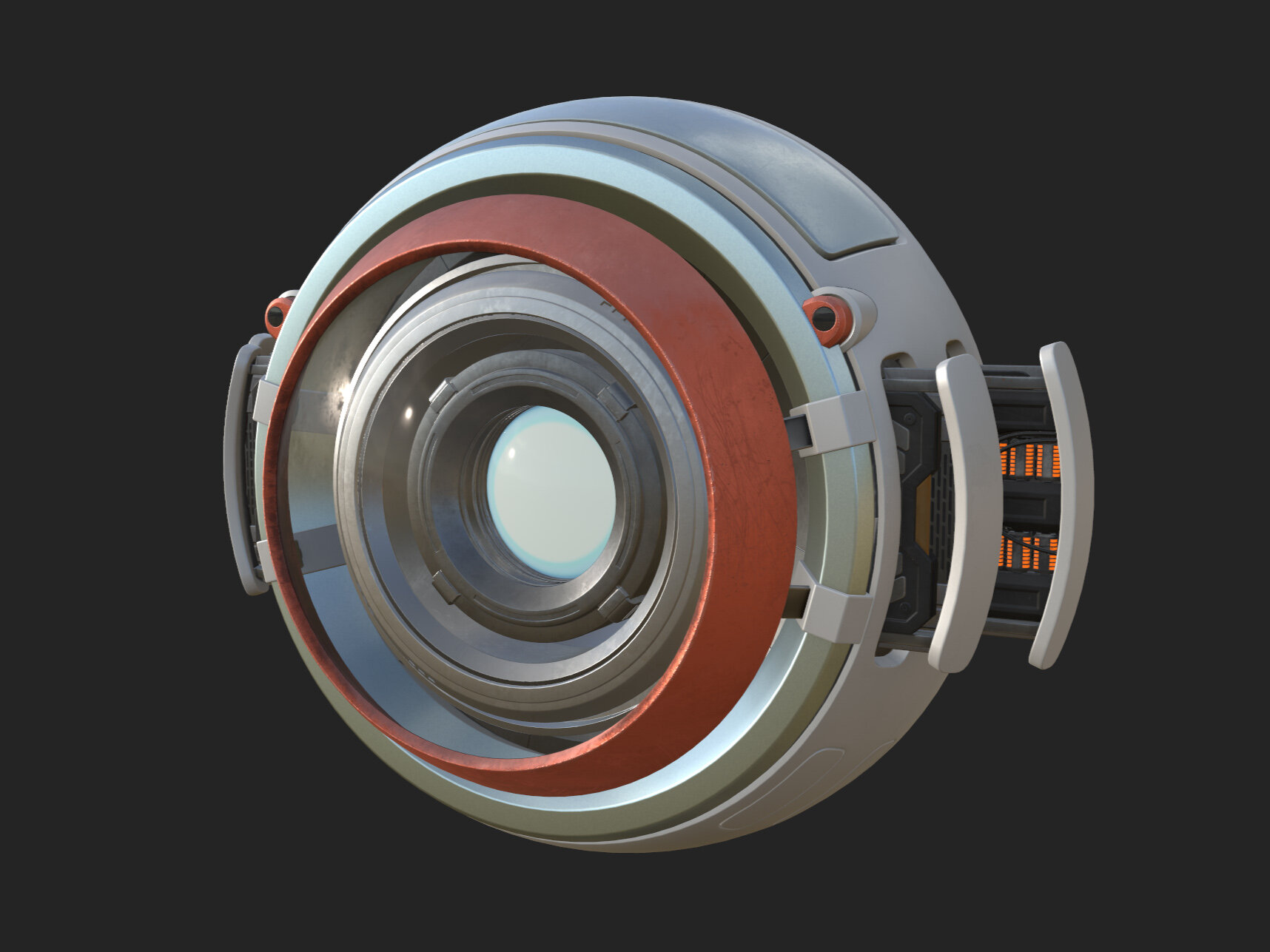
▲ 質感調整は、Substance 3D Painterで行われた
——今回はアニメーション作業を志願されたそうですね。
向後:
はい。今まではゼネラリスト的に取り組んでいたので、本格的なキャラクターアニメーションは初挑戦でした。
ただ、2025年にWOWさんが実施されたインターンシッププログラム(「WOW Student Program ーIgnite Your Creativity」)に参加した際、人間のモデルを動かした経験はあったので、その経験を活かしつつ、キャラクターアニメーションの経験が豊富な松本くんからアドバイスを受けながら作業を進めました。
——ロボットのアニメーションでこだわったところを具体的に教えてください。
向後:
最後までブラッシュアップしていたのが大型ロボット本体のアニメーションで、立ち上がる瞬間の重量感が出るように工夫しました。
一番こだわったのは、小型の丸いロボットの動きです。登場するカットも多いですし、好奇心旺盛な末っ子のようなキャラクター性を込めることを意識しながら動きを付けました。
伊藤:
向後さんは本格的なアニメーション作業は初めてだったにもかかわらず、とてもクオリティの高い動きに仕上げてくれて感心しました。



細部までこだわることで、リアリティを高める
——松本さんも、まずは3DCGとの出会いからお聞かせください。
松本:
高校生のときにMMD(MikuMikuDance)で遊んでいて、キャラクターに動きを付けることに面白さを感じていました。
武蔵美に入るとCGをやっている友人が周りに多く、その雰囲気に乗っかるかたちで本格的にCGアニメーションに取り組み始めました。現在は主にMayaとBlenderを使っています。
——本作では主人公のリグとアニメーションを担当されたそうですね。
伊藤:
今回は人物アニメーションを松本くんに全てお願いしました。人物アニメーションはどうしても難易度が高く、他に対応できるメンバーもいなかったので、大変助かりました。
松本:
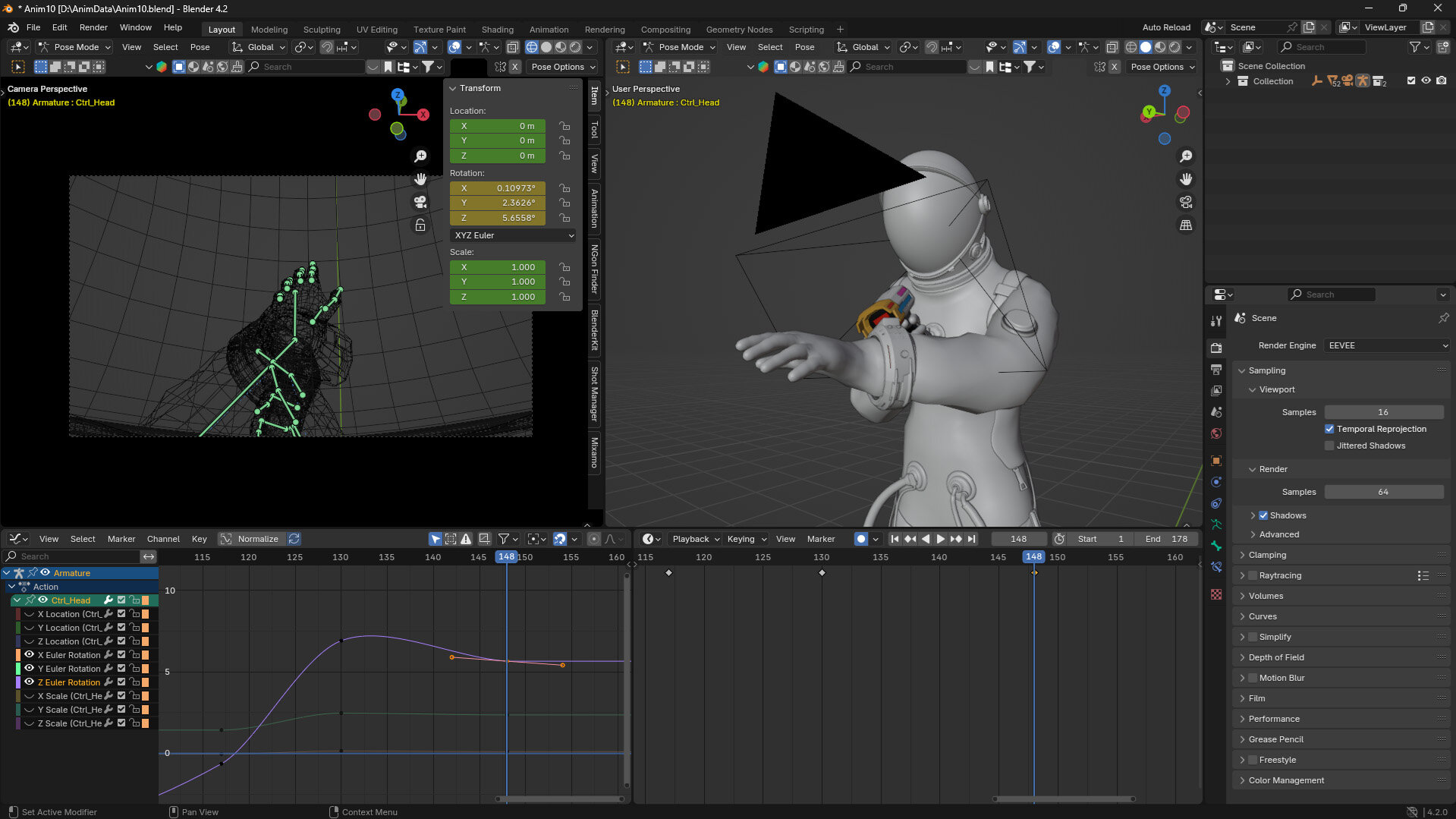
人物のリグは、Mixamoのモーションを流用できる構造を採用しました。歩行のループモーションをMixamoから読み込んでベースにしつつ、各カットの動き合わせてブラッシュアップしました。歩行以外のアニメーションはほぼ手付けです。
——主人公のアニメーションでこだわった点を教えてください。
松本:
向後さんが担当した小型ロボットは、球体型で感情表現が豊かなキャラクターなので、主人公動きまで極端にしてしまうとメリハリがなくなってしまうと考えました。
そこで主人公の動きはあえて無機質というか、淡々とした動きをベースにして、小型ロボットの感情表現が際立つようにしました。
主人公の動きでこだわったのは、リアリティです。微細な揺れなど細かい動きまでしっかりと調整しましたが、なかでもラストシーンで主人公がロボットの手に乗った後の揺れも全て手付けで作り込んでいます。
——共同監督たちが担当するショットワークとは、どのように連携しましたか?
松本:
アニメーションは突き詰めるとキリがなくなってしまうので、ある程度モーションとして成立した段階でいったん監督たちに共有することを心がけました。
アニメーションが付いた状態で監督側がカメラ位置やレイアウトの調整を早い段階から行えるようにすることで、後工程の手戻りを抑えられたと思っています。
山田:
今回は仕事ではなく授業課題なので、各メンバーがやりたいこと、新しく挑戦したいことを基準に役割を割り振りました。3人とも、それぞれ得意分野や興味のある領域で存分に力を発揮してくれました。

最終週はノンストップでレンダリングを回し続けた
——ここからは両監督に、それぞれのショットワークについて伺います。山田さんが担当されたシーンは、どのように作業を進めましたか?
山田:
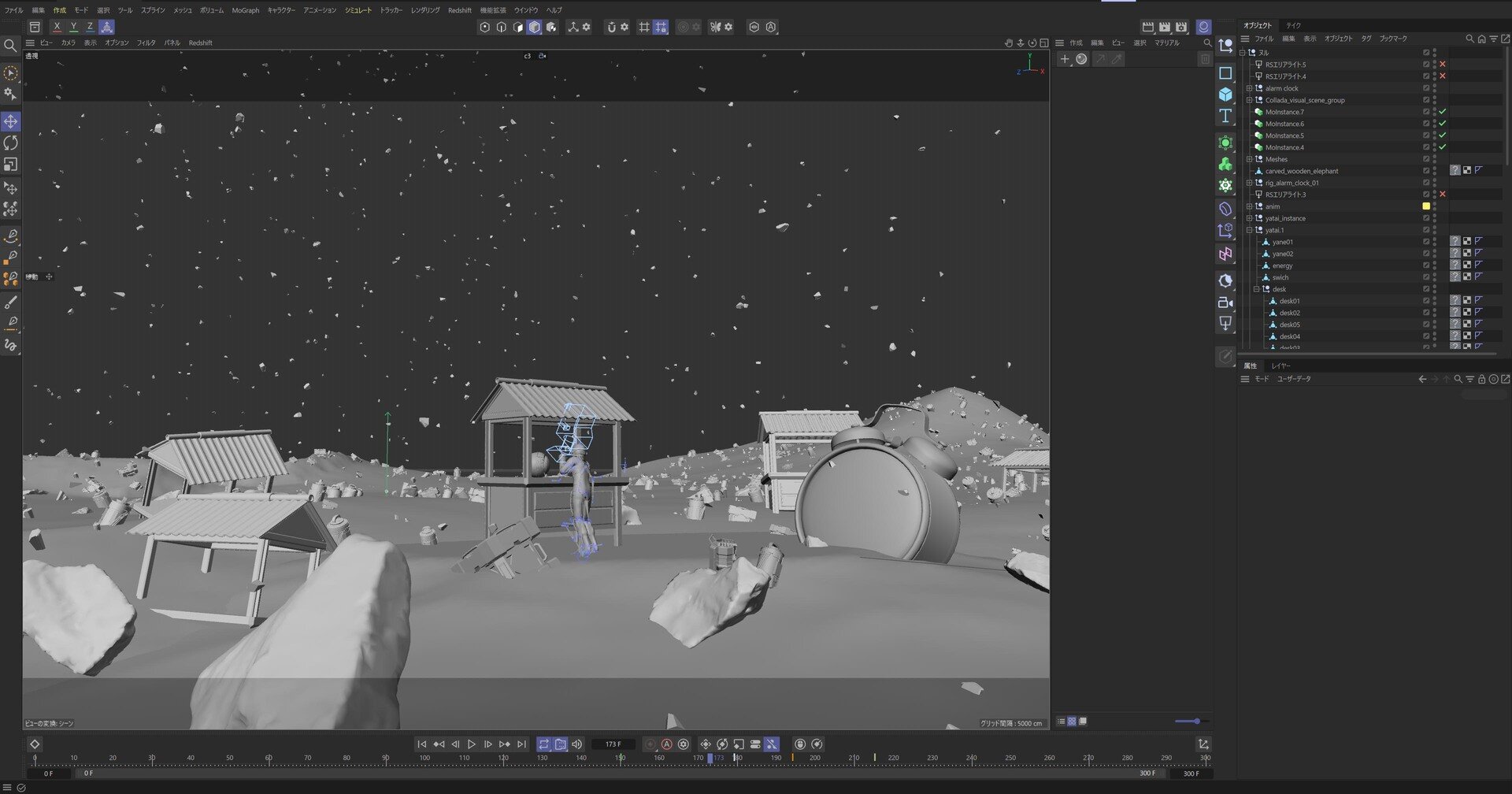
先ほどお話ししたとおり、ショットワークはCinema 4Dで行い、レンダラはRedshiftを利用しました。
ライティングは基本的にHDRIをベースにしつつ、奥や手前で影を調整したい箇所には追加でライトを置きながら画づくりを行いました。巨大な缶飲料の前で座っているカットでは霧の表現を多めに入れつつ、手前は黒くしっかり締めてコントラストを強めるなど、メリハリを意識しました。
——山田さんが担当されたパートでは巨大な日用品が色々と登場しますが、アセットはどのように作成したのでしょうか?
山田:
制作期間が限られていたことに加え、日用品なので市販アセットを積極的に活用する方針でした。Poly Havenをはじめ、使えるものはどんどん取り入れて時短を図っています。
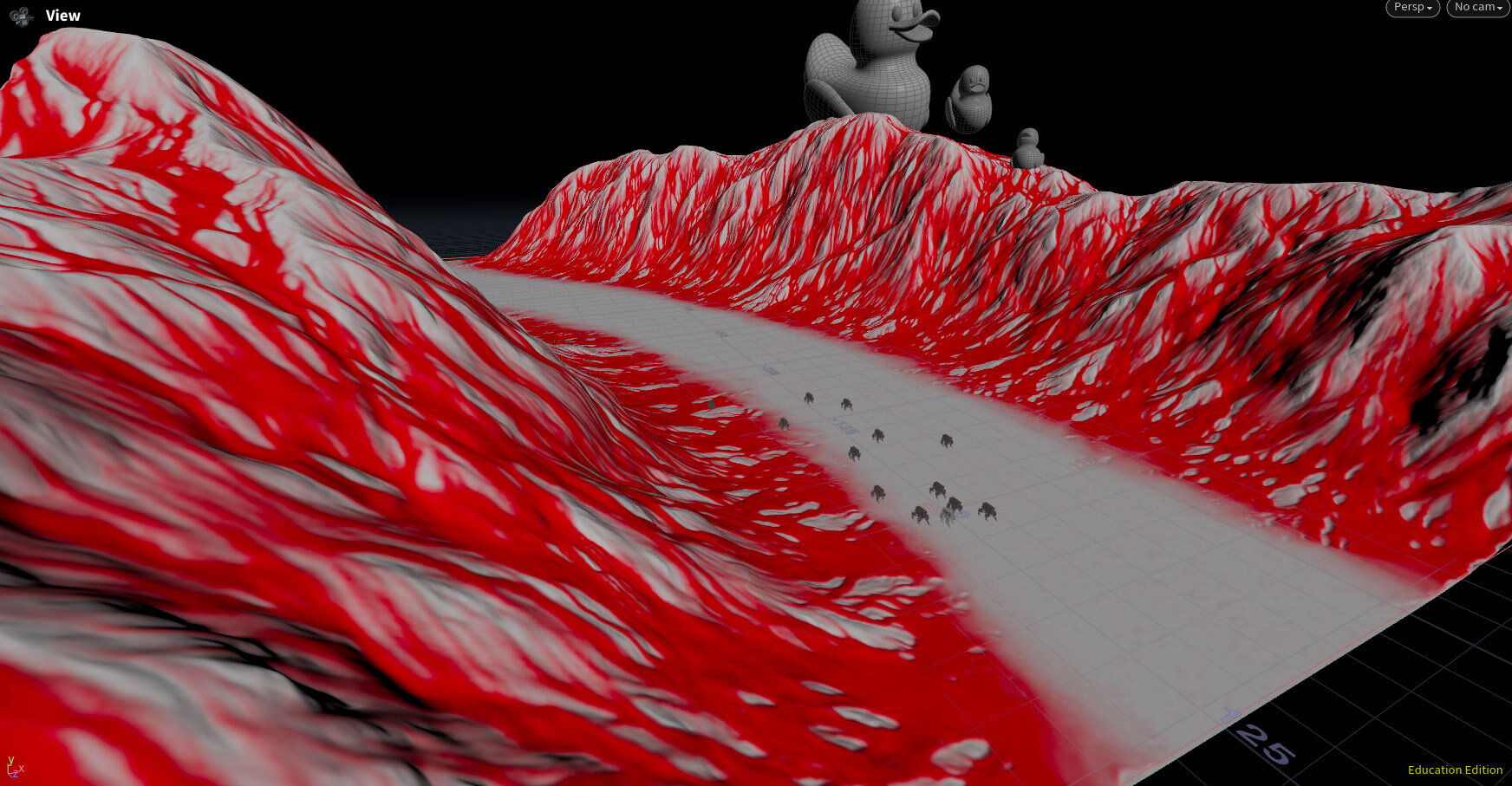
一方、砂や石粒が地形のように重なっている素材は負荷が高かったので、ポリゴン数をリダクションするなど、見映えをキープできる範囲でなるべく軽量化することを意識しました。
-

▲【STEP 1】巨大な缶飲料アセットの作業変遷。ベースの状態。Maxon OneのCinema 4Dアセットに対して、テクスチャのみ作り替えている -

▲【STEP 2】少し汚れのニュアンスを加えたメタルの質感を用意
-

▲【STEP 3】前工程の質感に対して元のカラーを乗算で重ねることで、元の色を保ちつつ暗めで荒々しい質感に調整 -

▲【STEP 4】世界観に馴染ませるために、サビや土で汚れたような質感を重ねた完成形
-
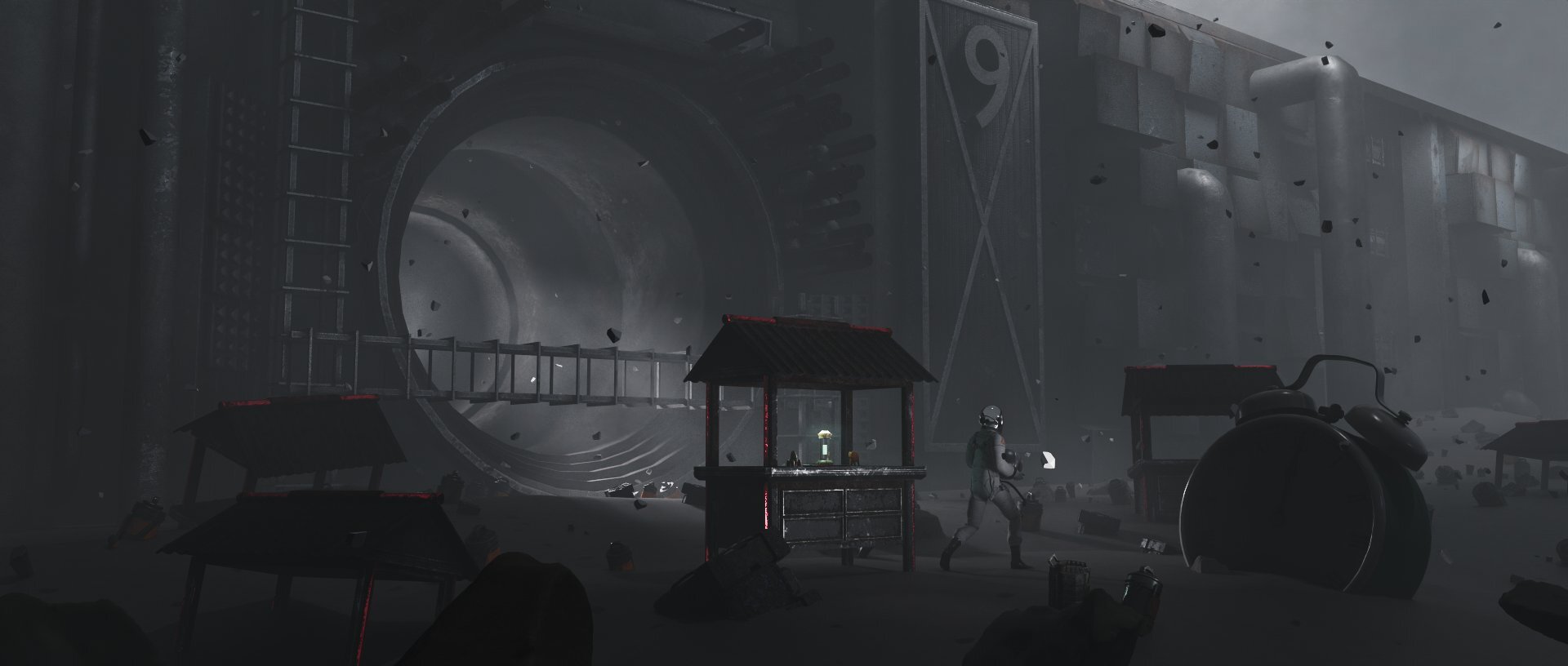
▲【STEP 1】ブレイクダウン。ライトなしのプレビュー -

▲【STEP 2】まずは全体の雰囲気をつかむために、叩き台のライティングを行う。奥の建物の赤い発光など強く光る場所もこの段階で決めていく
-

▲【STEP 3】RS環境でボリュームを追加。画面全体を霧のようなもやっとした空気で包み込んだ -

▲【STEP 4】霧の色を緑系に変更。「奥の建物の発光やコーラ缶の赤色とマッチさせたかったので緑色をチョイスしました」(山田氏)

——伊藤さんが担当されたパートはいかがでしょうか?
伊藤:
僕は今、Houdiniをメインツールにしているのですが、ノードを上手く組むことで美しい画を創り出せることに魅力を感じています。
この作品では、山田くんと同じくライティングはHDRIをベースに、主人公の足元やロボットの真下といった暗くなりがちな場所にはエリアライトを仕込み、カットとしての見え方を調整しました。
Houdiniには「ここに光を当てたい」「ここに影を落としたい」という指定をクリック操作だけで実現できる機能を備えているので、効率良くショットワークを行うことができました。
——ライティングはカット単位で作り込まれているのでしょうか。
伊藤:
はい、カットごとに毎回ライティングを変えています。お気に入りは58秒あたり、4足歩行メカが登場して情報量が一気に広がるシーンですね。このロボットは本当にかっこよく仕上がったので、自分でもよく見返しています。
——After Effectsによるコンポジットワークでは、どのような処理を行いましたか?
伊藤:
4足ロボットを下から見上げているシーンの太陽のフレア、37秒あたりでロボットがレーザーを放つシーンの発光、その直後のヒートディストーションなど、画的な合成を中心に組んでいます。加えて作品全体の編集とサウンドエフェクトの配置も、全てAfter Effects内で完結させています。
山田:
僕の担当パートでは、ほんのわずかにグラデーションを乗せたり、個人的に色収差の表現が好きなので(笑)、この作品でも薄く加えたりしています。
——ちなみに、おふたりの作業マシンはどれくらいのスペックですか?
山田:
僕の方は周りのメンバーと合わせる形でドスパラのBTOを使っていて、GPUはNVIDIA GeForce RTX 4060 Tiです。普段の制作でもかなり酷使しているので、そろそろ寿命が心配になっています(苦笑)
伊藤:
パソコンショップSEVENのBTOで、GPUはNVIDIA GeForce RTX 4090です。HoudiniのKarmaがGPU単体では動かない仕様だったため、XPUまたはCPUで回す必要があり、レンダリング工程ではそこに苦労しました。
——制作期間は6週間とのことですが、ペースとしてはどんな感じでしたか?
伊藤:
終盤で画としてのクオリティが一気に上がった印象です。レンダリングも最終週はノンストップで回し続けるような状態でした。
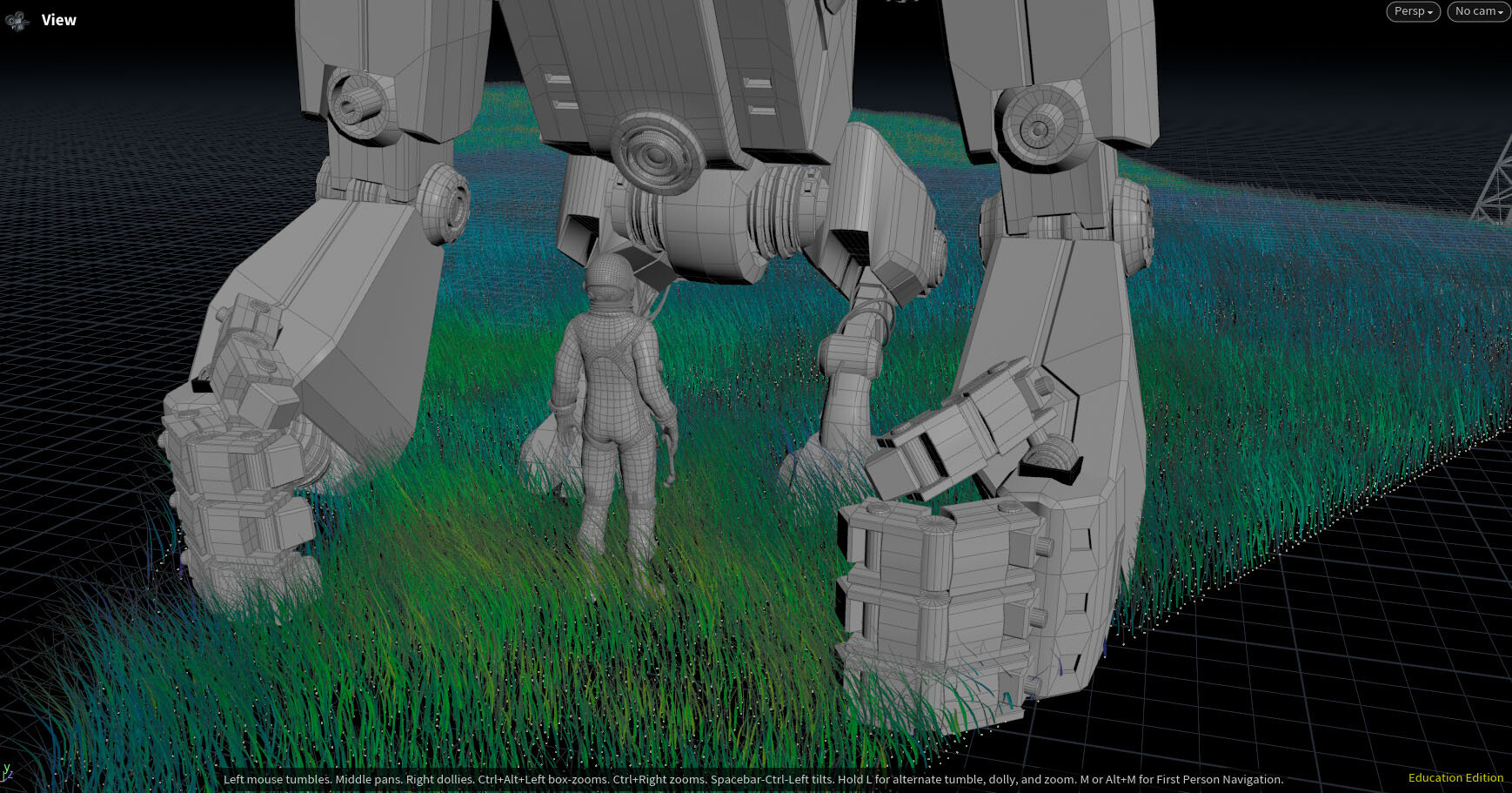
実は課題として提出した後、YouTubeに投稿するにあたって追加のブラッシュアップ作業を行いました。草原のシーンで草が揺れるシミュレーションを加えたり、いくつかのカットでサンプル数を上げて再レンダリングすることで、映像クオリティをさらに底上げしています。
-
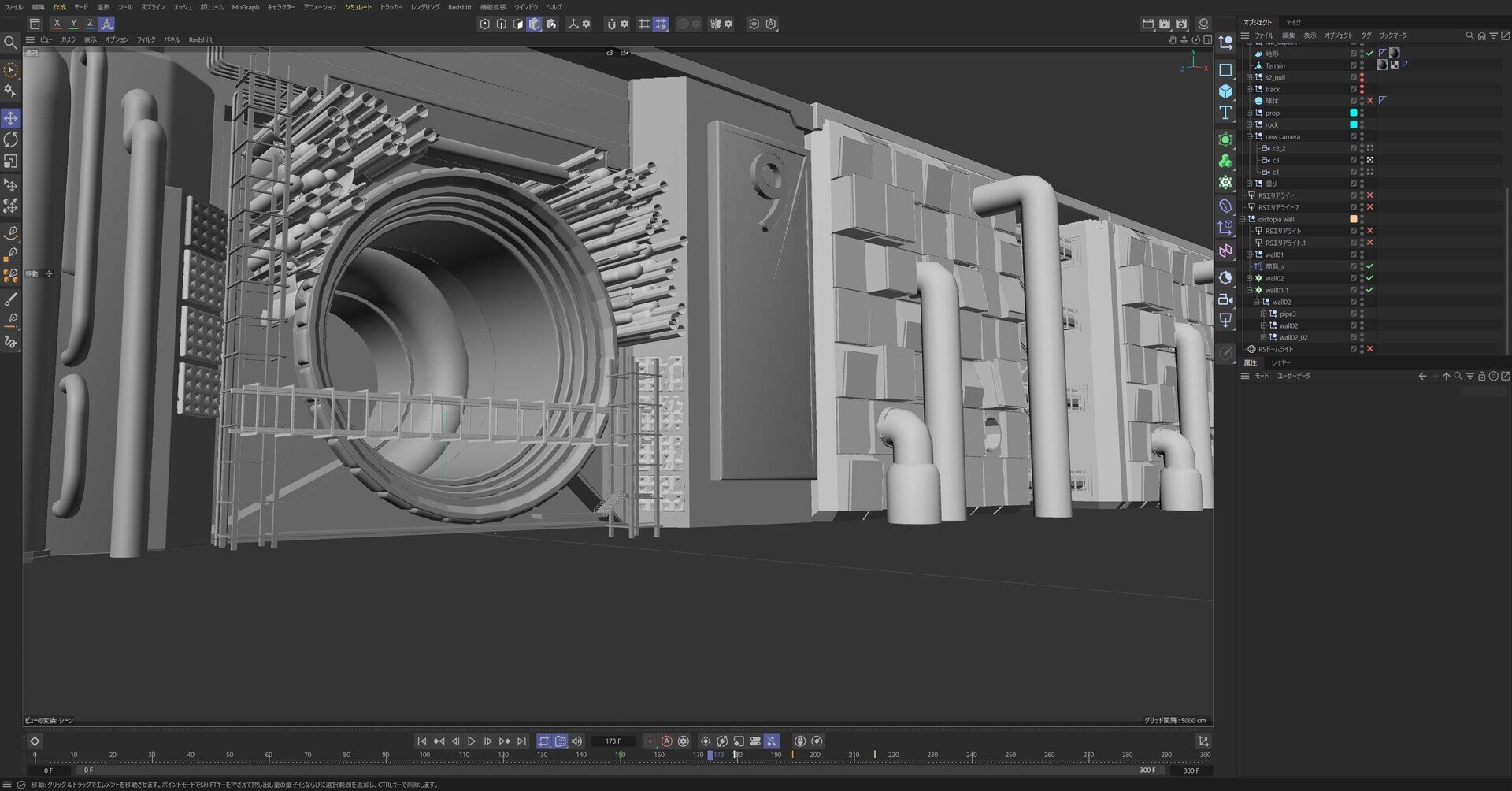
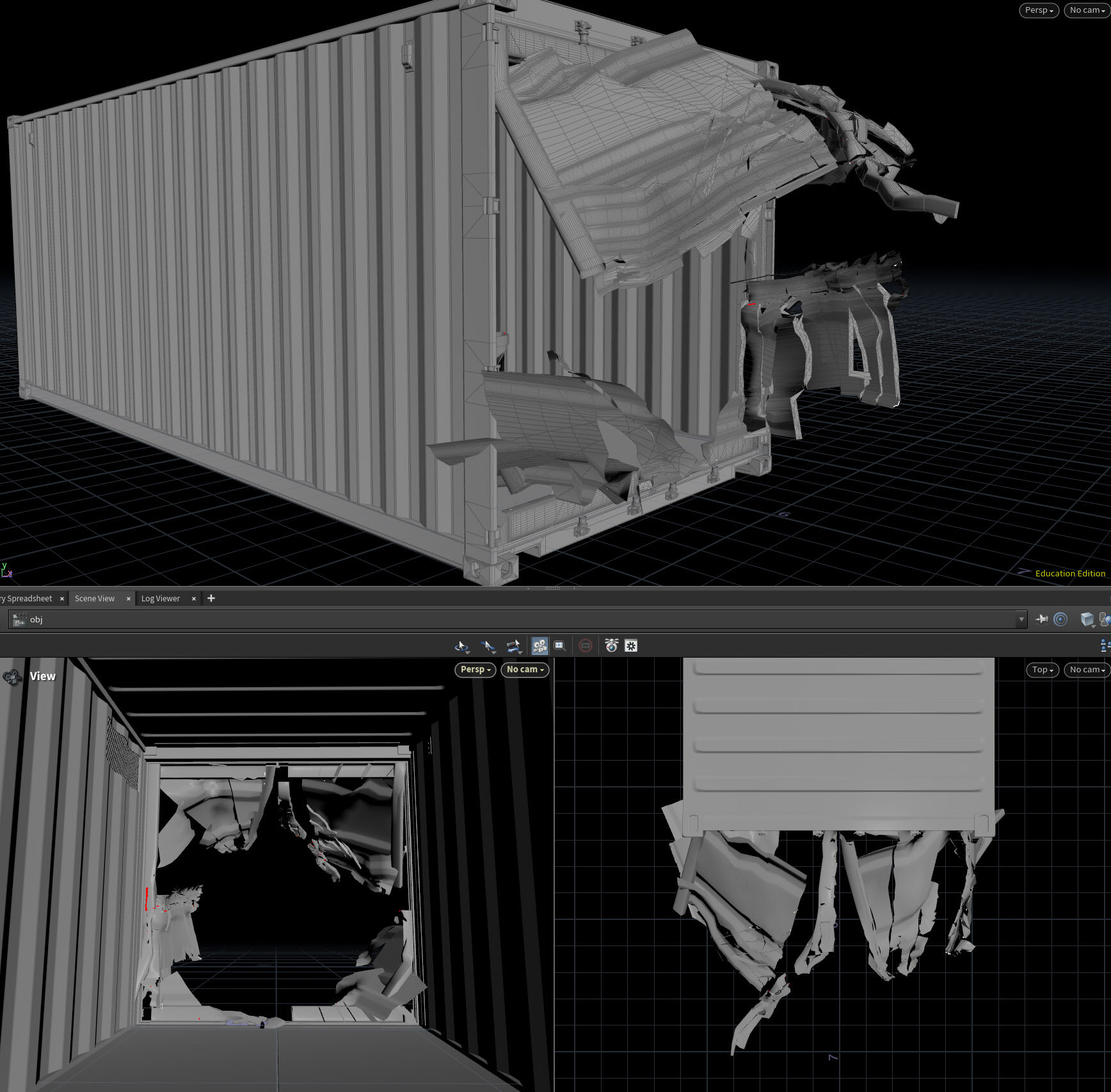
▲【STEP 1】ブレイクダウン。OBJコンテキスト(SOP)でのプレビュー -
▲【STEP 2】Stageコンテキスト(LOP)でのプレビュー
この経験を活かし、次なる挑戦が始まっている
——先生からの講評はいかがでしたか?
山田:
「粗を探そうとしたけど、見つからなかった」と言っていただけたのが素直に嬉しかったです。
授業の目的は、チーム制作の経験を積むことなので、特定のメンバーに作業が偏らずにチームワークで取り組んだ成果として評価してもらえたのかもしれません。
——本作は、SSFF & ASIA 2026のU-25プロジェクトにも選出されましたね。
伊藤:
力作になったので応募してみたところ、選んでいただくことができました。多くの方に作品を観てもらえる場ができて、メンバー全員にとって大きな励みになっています。

——最後に、それぞれの今後の展望をお聞かせください。
山田:
日用品をモチーフにするという作風で、今後も創作していくつもりです。
次作は、リミナルスペースのようなビジュアルで、「ロボットたちが普通の生活に憧れている」という設定に改めてチャレンジするつもりです。今年の学祭での展示を目指しています。
向後:
アニメーションに本格的に挑戦したことで、CGアニメーターを目指すことに決めました。卒業制作ではストーリーテリングのあるショートフィルムを作る予定です。
完成した映像を観て、ライティングによる画づくりに感動したので、そういった画づくりのスキルも磨いていきたいと思っています。
ジュ:
ゲーム背景アーティストを志望しているので、今回のチーム制作の経験をそのまま活かせると思っています。
私がモデリングしたものを、ほかのメンバーが別のツールで配置できるようにモジュール化していくといった作業は、まさにゲーム背景制作のワークフローに近いと思うので、これからもチームワークを意識しながら背景制作のスキルを高めていきます。
松本:
6週間という短いスケジュールだったので、最初に道筋を立てて逆算しながら進めることの重要性を学びました。今後の制作でも、最初にスケジュールを組んで「この日までにここまで終わっている」という運用を実践していきたいです。
ビジュアルで見せる作品が好きなので、自分のオリジナルワークではそれを意識しながら制作していくつもりです。
伊藤:
今回は技術的な面、特にカメラとライティング周りにこだわって制作しました。そこで得た経験を今後の自主制作にも反映させていきたいです。
ちょうど卒業制作のアイデアを練っているところで、ビジュアルによるストーリーテリングにこだわったショートフィルムを目指しています。1枚の写真を見たときに心が動くような、そういった感動を呼び起こせたらと考えています。
——ありがとうございました。皆さんのさらなるご活躍も期待しています!

INTERVIEW & EDIT_NUMAKURA Arihito