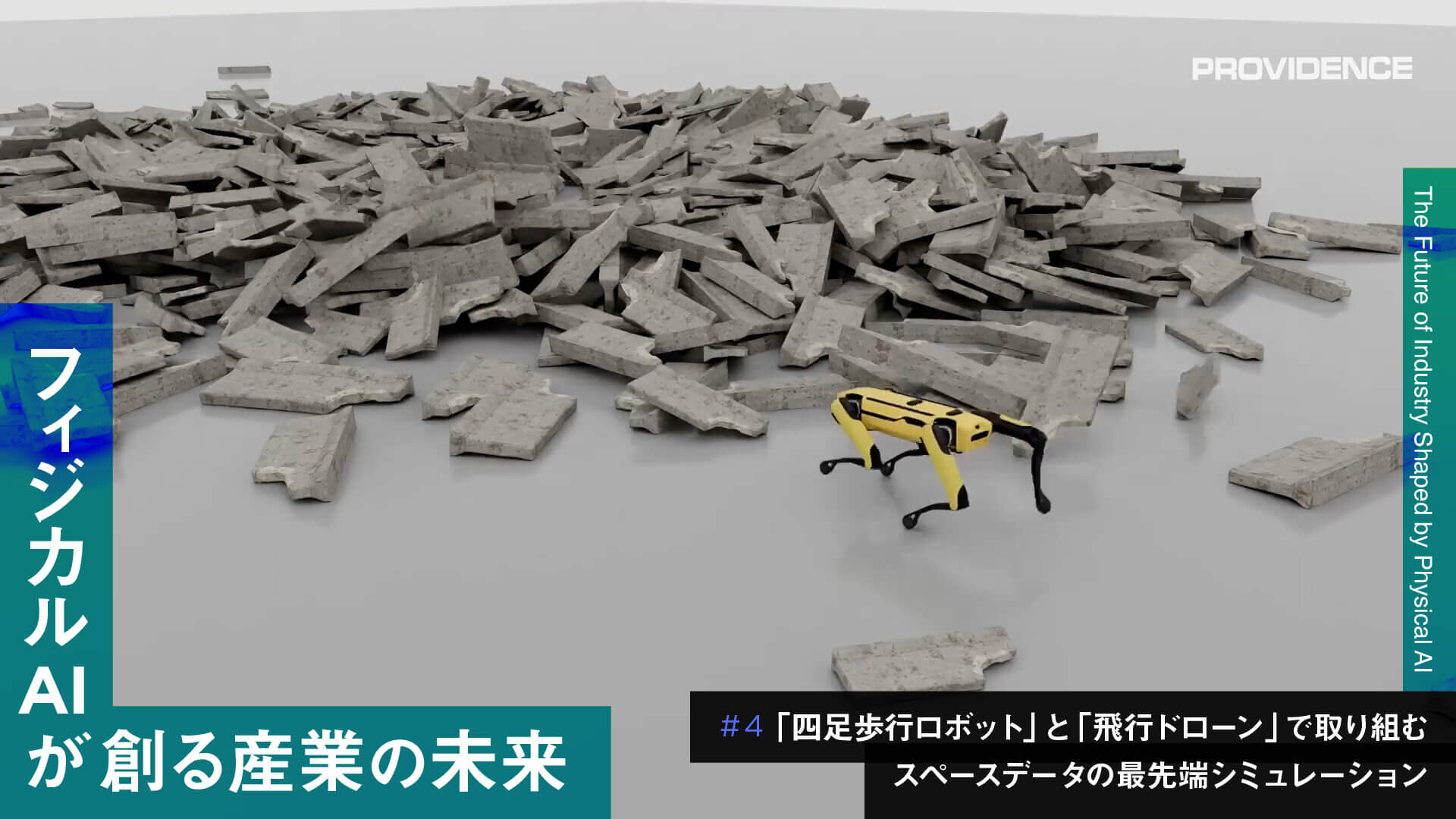
本連載では、ロボットや自動システムと融合するAI「フィジカルAI」がもたらす産業分野の変革の行方を追う。
近年、産業界で注目を集めるキーワード「デジタルツイン」。AI技術や高性能なGPU環境の進化により、3DCGを活用したデジタルツインは「現実世界の物理法則や人流、自然現象を忠実にシミュレーションし、社会課題を解決するための計算基盤」として、その存在感を高めている。
このデジタルツインの最前線を走るのが、スペースデータだ。同社が取り組む「宇宙開発」と「都市・防災」の融合、そして同社が圧倒的な強みを持つ「フィジカルAI」の具体的な実装、四足歩行ロボットやドローンを仮想空間で制御・検証する最先端シミュレーション技術の裏側について詳しく話を聞いた。
スペースデータが挑む「地球」と「宇宙」の融合
2017年に創立されたスペースデータは、「宇宙開発」と「地球上でのデジタルツイン構築」を主軸事業として掲げるテックカンパニーだ。同社は、衛星データやAI技術、3DCG技術を融合させた独自のプラットフォーム開発を進めている。
同社で統合技術本部デリバリー部門を統括する西井大智氏によると、同社の事業は大きく「地球事業」と「宇宙事業」の二つに分かれている。 「地球事業」では都市開発、防災、防衛を目的とした高精細なデジタルツインを構築し、「宇宙事業」では月面環境や国際宇宙ステーション(ISS)など、地球外の極限環境を正確に再現している。
同社はこの技術を活かし、官民や国際機関と連携した先進的なプロジェクトを数多く手がけてきた。JAXAとの共同によるISS日本実験棟「きぼう」のドローンシミュレーション、国土交通省の「PLATEAU(プラトー)」と衛星データを掛け合わせた高精細3D都市モデルの自動生成、さらには国連(UN)と連携した太平洋諸国向けの防災デジタルツインなど、その実績は多岐にわたる。
これらをスムーズに運用するため、同社は現実空間(フィジカル)とサイバー空間(バーチャル)をシームレスにつなぐ統合技術プラットフォーム「PROVIDENCE」を開発。民間向けの都市シミュレーションから、防衛、フィジカルAI、宇宙環境まで、4つのプロダクトパッケージを展開している。
「見た目のリアル」を超えた「物理的リアル」の追求
デジタルツインや3D都市モデルを作る企業は世の中に増えているが、スペースデータの真の強みはどこにあるのだろうか。西井氏は「単に目で見て美しいCGを作るのではなく、AIやロボットが“現実世界として認識し、行動学習できる”レベルの物理的リアリティを持っていること」だと断言する。
これまでの多くのデジタルツインは、人間の視覚を満足させるための「フォトリアル」がゴールだった。しかし、ロボットや自動運転、ドローンに搭載される「フィジカルAI」をトレーニング・検証するためには、表面のテクスチャが綺麗であること以上に、以下のような「物理環境の正確な再現(フィジカルリアル)」が不可欠になる。
●センサーシミュレーションの正確性: ロボットが持つカメラ、LiDAR(赤外線センサー)、超音波センサーが、仮想空間内の物体に対して現実とまったく同じ反射やノイズを返すかどうか。
●物理法則の厳密性: 重力、摩擦係数、空気抵抗、物体の質量や硬さが正確に計算されていること。
●動的な環境変化: 静止した街ではなく、時間、天候、風、そして混雑する「人流」がリアルタイムに変化し、ロボットの行動を妨げるノイズとなる環境。
スペースデータは、NVIDIA Omniverseをコアに据えることで、この「フィジカルリアル」を圧倒的なクオリティで実現している。OpenUSDをベースにしたパイプラインにより、東京・丸の内の超高精細な都市空間のなかで、時間や天候の変化、数万人規模の動的な人流シミュレーション、さらには建物の瞬時な入れ替えとそれに伴う日照・景観変化までをすべて1つの計算基盤上で成立させているのだ。
【フィジカルAI事例1】4,096並列・5億ステップで叩き込む四足歩行ロボットの強化学習
フィジカルAIの具体的な応用例として、西井氏が紹介してくれたのが「四足歩行ロボット」のロコモーション(歩行制御)最適化だ。
現在、工場や建設現場、災害区域などの不整地を歩行するロボットの開発が世界中で進んでいるが、実機を使って「歩行の練習」をさせるのは極めて効率が悪い。何度も転倒して高価なハードウェアが破損するリスクがあり、現実の時間(1倍速)でしか学習を進められないからだ。
スペースデータでは、NVIDIA OmniverseおよびNVIDIA Isaac Simの物理シミュレーション環境とNVIDIA Isaac Labを用いて、この課題をデジタルツイン空間上で解決している。 「具体的な学習内容としては、段差や瓦礫といった不整地でも『転びにくい』、あるいは『何かに引っかかっても自ら姿勢を回復できる』ような、下位レイヤーの頑健な歩行ポリシー(制御ルール)を獲得させる強化学習を行なっています」と西井氏は語る。
驚くべきはその圧倒的な計算規模だ。GPUによる超並列シミュレーションの強みを最大限に活かし、なんと4,096並列の仮想環境を構築。合計で約5億ステップという、現実世界では不可能なレベルの大規模な試行錯誤を驚異的なスピードで回し、AIの学習を加速させている。
さらに興味深いのは、そのアプローチの割り切りだ。 「この歩行ポリシーの学習においては、カメラやLiDARなどの外界センサーの情報には頼っていません。主に関節の角度や速度といった、モーターからのフィードバック(固有感覚:プロプリオセプション)を中心とした観測ベースで学習させています」
外界の見た目に惑わされず、自分自身の足にかかる負荷や角度だけでバランスを取る野生動物のような足腰の強さを、バーチャル空間で身に付けさせているのだ。同社では、このトレーニングを通じた劇的な挙動の変化や、学習前後の比較を視覚的に確認できる動画も整備しており、シミュレーションの効果を明確に実証している。
【フィジカルAI事例2】ドローンの飛行を成立させる「物理モデルの忠実度」と「計算コスト」のトレードオフ
もう一つの重要な柱が、「飛行ドローン」のシミュレーション環境構築だ。ここで西井氏は、一般的なイメージとは異なるリアルな開発の舞台裏を明かしてくれた。実は、同社のドローンシミュレーションにおいては、現段階ではAI学習自体は使用していないのだという。
「ドローンにおいては、まずはOmniverseやIsaac Sim上で『飛行を成立させるための物理モデルと制御基盤』を徹底的に作り込むことに注力しています。揚力や反トルクといった厳密な飛行原理に基づき、シミュレーション内で姿勢制御や移動が破綻なく成立するような実装を丁寧に行なっています」
ここでスペースデータが仕掛けた工夫が、「シミュレーションの忠実度(解像度)と計算コストのトレードオフの整理」だ。同社は、目的に応じて以下の3つのレベルの物理モデルを用意している。
1.高解像度モデル: モーター単位・プロペラ単位で精密に物理挙動を再現するレベル
2.中解像度モデル: 発生する力を「合力」として近似して計算するレベル
3.低解像度モデル: 速度を直接与えて動作させるレベル
「これにより、1機のドローンの挙動を限界まで精密に検証したい場合と、プラント(工場・発電所)警備のように多数のドローンを同時に飛ばして運用検証したい場合など、顧客の目的に合わせて最適な実装を切り替えられるようにしています」
西井氏は、強化学習との関係性についてこう付け加える。「まずは、ドローンが何度も試行錯誤できる『厳密な検証環境』を構築し、Planning(計画)、Flight(飛行)、Analysis(分析)という開発の反復サイクルを高速に回せる状態を作ることが最優先です。この強固な物理基盤が整って初めて、将来的な最適化や学習的アプローチ(AI学習)が真に活きてくると考えています」
高精度なシミュレーションの裏側。Newton×Isaac Simの粒子計算ソルバー
さらに高度な物理現象をシミュレーション空間に組み込むため、スペースデータでは最先端の物理ソルバーとの連携にもチャレンジしている。
「現状は、NewtonフィジクスのMPMソルバー(Material Point Method:物質点法/粒子計算用ソルバー)で計算させた結果を、Isaac Sim上で表示・確認できる環境を構築し、検討結果の評価を行なっています」
MPMソルバーは、砂や雪、流体、あるいは破壊される構造物など、従来のポリゴンや単純な剛体計算では表現が難しい複雑な連続体の物理挙動を高精度に計算する技術だ。これがIsaac Simのロボティクス環境と融合することで、ロボットが泥濘(ぬかるみ)を歩く際の足元の沈み込みや、ドローンのローター風が地面の砂塵を巻き上げるような、極めて微細かつ複雑な相互作用の検証が可能になる。
「現時点では、このMPMソルバーに関する連携はNewtonからIsaac Simへの『一方通行』のデータ取り込みに留まっていますが、今後のアップデートによって、よりインタラクティブな双方向連携ができるようになることを大いに期待し、研究を進めています」と、西井氏はさらなる精度向上への意欲を見せる。
実機メーカーとの共創で、フィジカルAIを社会へ実装する
スペースデータが次に見据えるのは、この高度なバーチャル訓練場で育て上げた技術を、現実世界へと大量に送り出すフェーズだ。西井氏は、今後のチャレンジについて熱く語ってくれた。
「今後は、ロボットやドローンなどのハードウェアを展開されているメーカー企業様との連携をこれまで以上に強化していきたいと考えています。すでに実機へのAI実装プロジェクトは着実に進んでいますが、このシミュレーションから実機へという流れ(Sim-to-Real)の取り組みを、さらに多様なデバイスへ広げていきたいです」
自動化や自律化、AI化の必要性を感じつつも、現実世界での開発コストや破損リスクに悩む実機メーカーは多い。そこにスペースデータの「物理的リアルなデジタルツイン」が介在することで、開発スピードは数百倍に跳ね上がる。 「自社デバイスの自律化を検討されているメーカー様がいらっしゃいましたら、ぜひ技術的な連携を模索させていただきたいです。具体的な製品開発に合わせて、まずは情報交換からでもお気軽にお問い合わせいただけると嬉しいですね」
お問い合わせ
エヌビディア合同会社
www.nvidia.com/ja-jp/contact