本連載では、ロボットや自動システムと融合するAI「フィジカルAI」がもたらす産業分野の変革の行方を追う。
今回のテーマは、「『ELSA Physical AI Lab』に見るフィジカルAI研究開発の現状」。
エルザ ジャパンは2025年12月に、フィジカルAIの研究開発を推進する目的で、研究拠点 「ELSA Physical AI Lab(エルザ フィジカルAIラボ)」を設立した。本ラボの設立の経緯や研究開発の方針などを、エルザ ジャパンのフィジカルAI事業部部長の岡田英彦氏と電気通信大学の産学官連携センター客員教授の中嶋信生氏に聞いた。
「ロボットとAIをつなぐ」研究開発の拠点
CGWORLD(以下、CGW):ELSA Physical AI Labが設立された経緯を教えていただけますか?
電気通信大学 中嶋信生氏(以下、中嶋):まずはELSA Physical AI Labが入居する本学のUECアライアンスセンターについてご紹介します。一般企業との共同研究の連携を推進することを目的として、2017年に設立されたのがUECアライアンスセンターです。建物は5階建てで、共同研究する企業が入居するための部屋を40部屋用意しています。それぞれの部屋の広さは50平米程度です。
我々は入居者の活動のサポートしておりまして、共同研究の契約支援や、採用活動の支援などを行なっています。また、年に4回ワークショップを開催しておりまして、入居者同士や企業との交流を深める活動も実施しています。

中嶋信生氏
電気通信大学 産学官連携センター 客員教授
2000年に電気通信大学人間コミュニケーション学科教授に就任。退官後、特任教授として産官学連携センターにて企業活動のサポートを行う。2017年よりUECアライアンスセンターの運営支援に従事
エルザ ジャパン 岡田英彦氏(以下、岡田):フィジカルAIというところに関連付けてお話しますと、弊社ではロボット関連の商材を扱い始めたのが2023年頃でした。現在は全地形対応車輪付き四足歩行ロボット「LYNX M20」をはじめ、ロボットアームやロボットハンドなど様々なロボット製品を取り扱っています。それらのロボット制御をするうえで、昨今注目を集めているのがAIを使った制御というわけです。
-

LYNX M20が段差を認識し、乗り越える様子 -

UECアライアンスセンターの敷地内の屋外スペースにて、LYNX M20を試験操縦する様子
弊社のロボット商材がAI技術とマッチングするということも含めて、単純にハードウェアだけを売るのではなくソフトウェアやシステムをインテグレーションして提供していくところを目指していきたいという思いがありました。ただ、インプリメントしてサービスを展開するのは時期的には早い段階でした。
そこで、AI技術を研究してノウハウを蓄積することを目的としつつ、外部の方との技術交流も図りたいということで、ELSA Physical AI Labを設立するに至りました。実際にUECアライアンスセンターに入居したのは2025年12月でして、その後2026年1月にフィジカルAI事業部を起ち上げ、「ロボットとAIをつなぐ」技術を生み出すため、研究開発をする拠点としてラボの運用を開始しました。

岡田英彦氏
エルザ ジャパン フィジカルAI事業部 部長
エルザ ジャパンにてグラフィック関連、XRやヘッドセットなどの分野を担当。現在は2026年1月に新設されたフィジカルAI事業部部長を務める
CGW:フィジカルAIに関してどのようなアプローチをされていらっしゃいますか?
岡田:まず、フィジカルAIに関してわかりやすいイメージとしては、"最先端のAIが実世界で動作する形態"という言い方ができるかと思っています。フィジカルAIはロボットの有効な用途の1つですが、研究開発をするにあたり4つのポイントがあると考えています。
まずは「データ」についてで、フィジカルAIでは単純なデジタルデータではなくて、現実の物理環境下の実データが求められます。人間の動きなどをセンシングし、かつクオリティの良いものを使わないと、その後に得られるオペレーション用のデータ自体も質が低下してしまいます。
次に「シミュレーション」も重要でして、基本的には現実空間の挙動を完全に再現することは困難です。それを実際に現実での挙動に落とし込んだ時にどの程度のギャップがあるか、そしてそのギャップをどう埋めていくかを考える必要があります。
さらに精度を上げていくために「ハードウェア」にも着目する必要があります。ロボットそのものに対する知見、たとえば運動力学の深い知識がないと満足にシステムをコントロールできません。
最後にこれらすべてを統合的に「インテグレーション」していくことが重要になります。それぞれが深い専門知識を必要とする分、互いに結び付けてシステムやサービスとして構築することもフィジカルAIでは技術的なポイントと位置付けられるでしょう。
CGW:ありがとうございます。この施設ではフィジカルAIに関して具体的にどんな研究をされているのでしょうか?
岡田:弊社ではフィジカルAIに関して戦略的にアプローチするため5つの研究テーマを設定しています。以下でそれぞれのテーマについてご説明いたします。
①VLM/VLA/LLM/SLM 統合研究

岡田:まず始めに着目すべきはAI技術の部分で、最先端の生成AIモデルとロボティクスの融合によって、高度な認知・判断能力を持つシステムの構築を目指します。
生成AIのモデルとして、LLM(大規模言語モデル)やSLM(小規模言語モデル)といったランゲージモデル、VLM(視覚言語モデル)という視覚情報も含めたランゲージモデルがあります。そして、それらを使ったVLA(ビジョンランゲージアクション)といったモデルもあり、これらのモデル群をどのように使っていくかというのを研究していく想定です。
VLAは比較的最近の手法ですが、これを使ってロボットのシミュレーションにおける動作を決めていくというプロセスがあり、その精度を上げていくことなどに取り組むことを考えています。
②高精度フィジカルシミュレーション

岡田:次に、シミュレーションとリアルのギャップを埋めるための手法の研究が必要になるでしょう。例えばデジタルツイン環境での強化学習ですとか、VRデバイスや専用ボディースーツと絡めての模倣学習を使った形でシミュレーションの精度を上げていくことが考えられます。目的に適した手法を採用しつつ、安全かつ効率的な学習サイクルを確立することを目指します。
このラボの強みとしては、シミュレーションした結果を実際のロボットを使って検証できるという点があります。単純にAIモデルを作ったりシミュレーションするだけでなく、現実の具体的なソリューションを作り出せるというのがこのラボをお使いいただくメリットですね。
③多様なAIコンピューティング環境を活用したフィジカルAIの実装研究

岡田:3つ目は、GPUやNVIDIA JetsonなどのエッジAIデバイス、専用AIチップをどのように使い、組み合わせるかといったインプリメンテーションの考察をすることが挙げられます。
上記のデバイスを用いて、GPUサーバからエッジAIデバイスまで包括的に検証し、リアルタイム推論・制御を可能にする実行環境を構築するわけですが、ロボットアームやロボットハンド、そして入力系のトラッキングのシステムもあわせて様々な組み合わせを検証する必要があります。
このラボでは、シミュレーション結果に対して、上記のようなシステムを構築するための実際の機材を用いて検証することができることが利点です。
④GPU Test Drive 環境提供
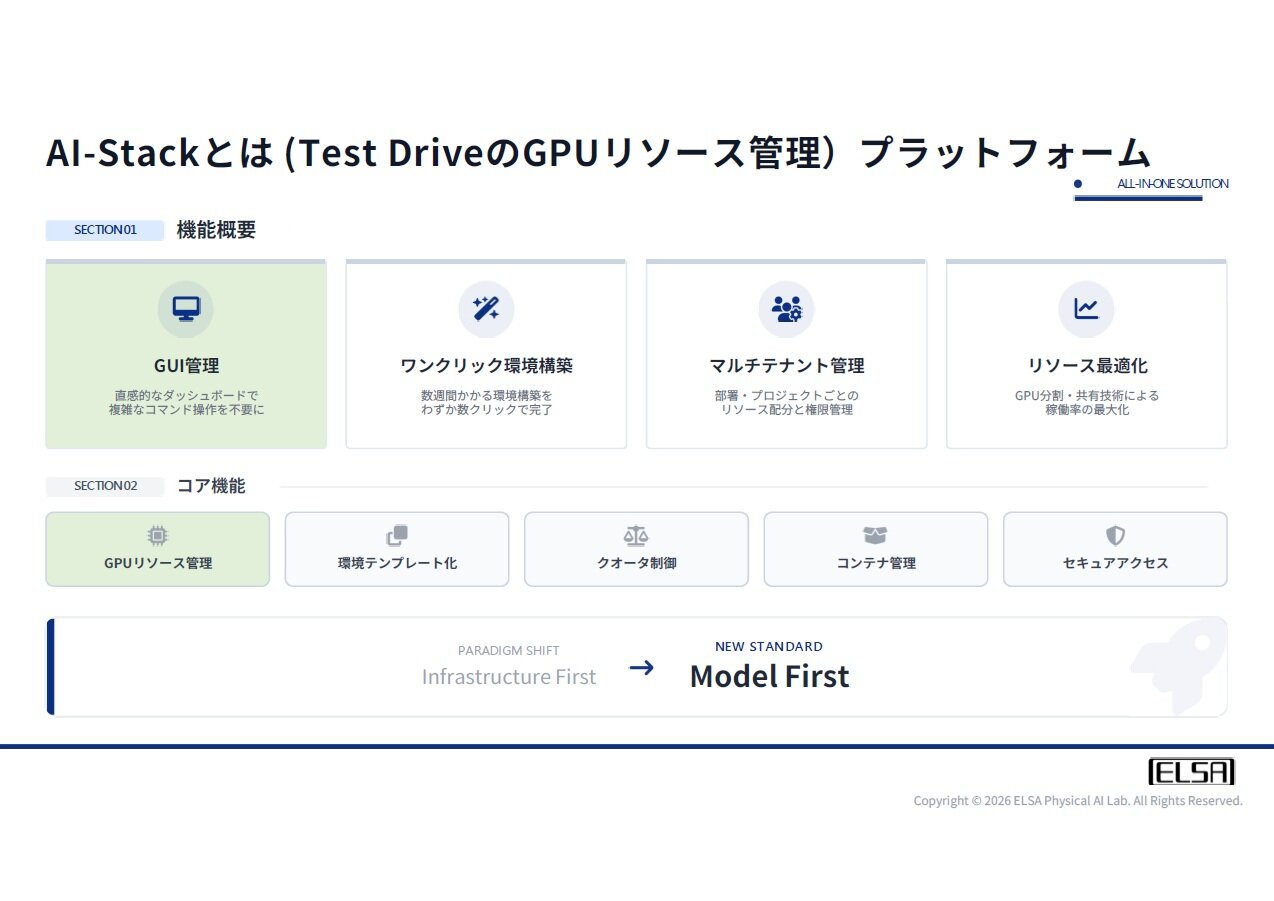
岡田:フィジカルAIのシステム運用にあたっては、高速なGPUを使う必要がありますが、現実的な問題としてGPUの利用が偏在化することによるリソース不足という課題があります。このGPUの不足に対して、保有リソースをどのように効率化して生成モデルで使っていくのかが問われますが、弊社ではテストドライブという独自の環境を提供することが回答になるかと考えています。
GPUサーバを効率的かつ、利用者にわかりやすいかたちで提供するためのリソース管理プラットフォーム「AI-Stack」を備えていまして、GPUリソースでお困りの企業の方や研究者の方に対して、このラボで保有しているGPUの利用ご提案を進めていきたいですね。

>> ワークステーション ELSA VELUGAシリーズ
⑤産学連携推進
岡田:最後のテーマとして重要視しているのは、大学・企業との共同プロジェクト創出等を通じた、実社会課題の解決と最先端技術の社会実装の推進です。
前述したようなフィジカルAIに関する取り組みは、私どもだけでは実現できないので、産学連携という形で様々な分野の研究者ですとか大学の方と共に研究開発していきたいと考えています。
ロボット機材やGPUリソースの提供により研究開発を全面的にサポート
CGW:ELSA Physical AI Labと他のAI研究機関との違いは何でしょうか?
岡田:フィジカルAIの研究開発で必要になる機材面でのサポートを提供しているところですね。主に「ロボットの共有」「GPUリソースの共有」の2点があげられるかと思います。単純にAIモデル生成だけでしたらGPUがあればできますが、それを物理的に展開するためには実際にモノがなければなりませんが、そういう環境が提供できるのが他のAI研究機関との差別化になります。
-

モーションキャプチャグローブにより同期して動くハンドロボット -
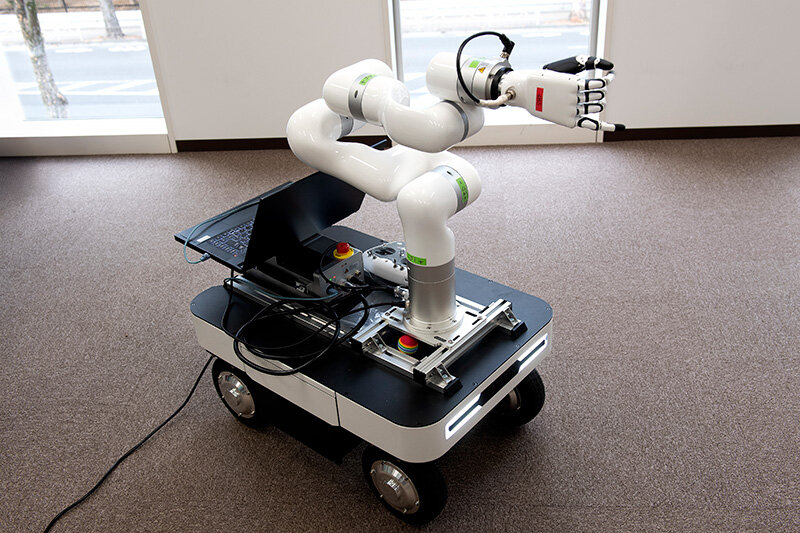
ラボで保有するUGV+アーム+ハンド複合コントロールロボット
また、せっかく大学の施設内にラボを構えていることもありますので、エンジニア人材の育成にも取り組んでいきたいですね。前述したように、フィジカルAIでは、AIのみならず、シミュレーションやロボット等の分野の専門知識を必要になります。フィジカルAIに精通したフルスタックエンジニアのニーズが高まることが予想されますので、そういった専門的な知識・技術をもった人材育成に取り組みます。
CGW:現在進行中、または今後予定している共同研究プロジェクトがあれば教えてください。
岡田:すでに複数社からお引き合いをいただいている状況です。昨年サービスをスタートさせたばかりということもあり、現状で公にできるプロジェクトは多くありませんが、監視目的で4足歩行のロボットを導入いただいた実績はございます。
AIを使用した事例ではありませんが、今後のクライアントの要望次第で運用方法を変更・ブラッシュアップしていくことも考えられます。現状は「見つけるだけ」の監視ロボットですが、AIを導入することでより高度な利用の仕方があるかもしれません。
CGW:フィジカルAIの研究開発において、CGクリエイターが関われることや貢献できることがあれば教えてください。
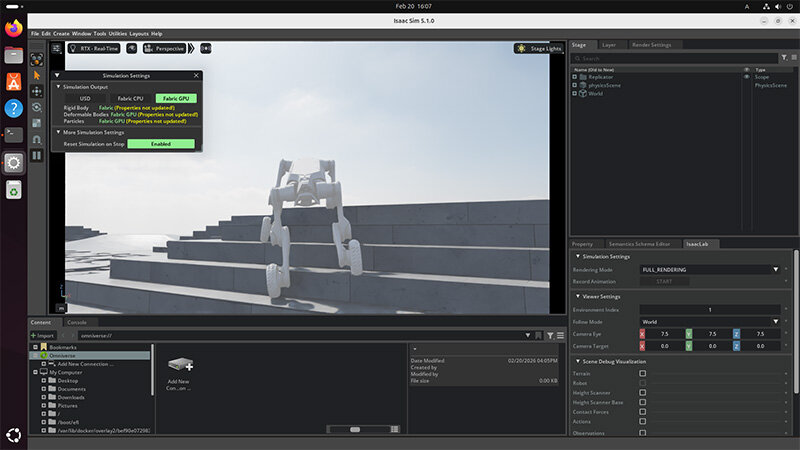
岡田:シミュレーション分野において、我々はIsaac SimというソフトウェアをAIの強化学習に利用しています。Isaac Simでは、現実で運用するロボットと同じ形状・特性をもつCGモデルを仮想空間上に配置し、周囲の環境の形状や材質などの要因による動きの変化を計測します。
その際、仮想空間の周りの環境は当然3次元データなので、そのCGデータは必要に応じて作り上げていくことになりますが、このデータ作成に関してはやはりCGクリエイターさんの得意な分野であろうかと思います。
一方で、強化学習用に用いるデータでは、地形データや各種の材料のデータなどがありますが、形状以外にも摩擦や抵抗なども考慮したデータが必要になる点が特徴的です。そういった見た目に現れない部分も含めたデータ・コンテンツの作成ができる人材が求められそうですね。
-
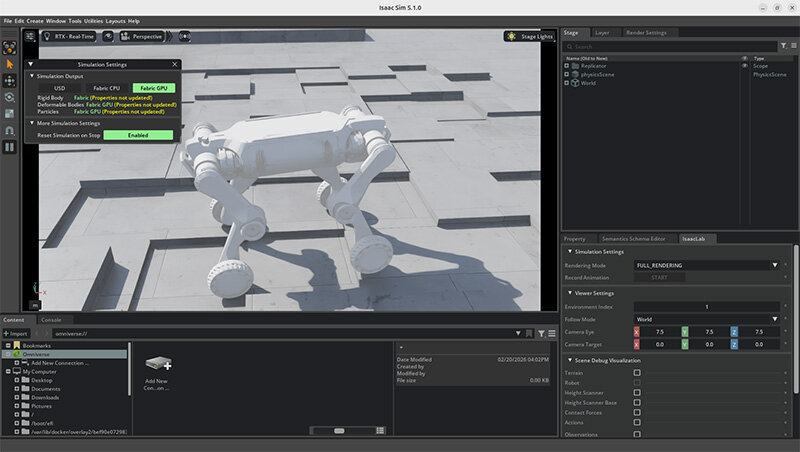
Isaac Simを用いた強化学習作業の様子 -
CGW:ELSA Physical AI Labが目指す成果やビジョンがあればお聞かせください。
岡田:本ラボでプロジェクトが実施される中で、ノウハウが蓄積され、新たなシステムやサービスの展開が生まれることを期待しています。企業や研究機関の皆様とぜひ共同で研究開発を進めたく思っておりますので、GPUパワーにお困りの方やAI-Stackに興味をお持ちの方はぜひお問い合わせをいただければと思います。
ELSA Physical AI Lab 設備概要
■ AI関連機材・設備
・ELSA VELUGA-R A50E G6(NVIDIA RTX PRO 6000 Max-Q搭載)
・Jetson Thor 開発者キット(画像認識などの検証・開発用)
・NVIDIA DGX Spark、MSI EdgeXpert(LLM検証・関連開発用)
お問い合わせ
株式会社エルザ ジャパン フィジカルAI事業部
www.elsa-jp.co.jp
E-mail:sales_md@elsa-jp.co.jp
Tel:03-5765-7391(代)
TEXT & EDIT_小倉理生 / Riki Ogura(種々企画)
PHOTO_弘田 充 / Mitsuru Hirota