シリコンスタジオは、竹中工務店が取り組む小型群ロボットシステムのための月面シミュレーション環境開発において、UnityとROS(Robot Operating System)を連携させた、デジタルツイン技術の提供を発表した。
複数の小型ロボットの動作検証を目的とし、ROSで受信した指令をUnity上で再現、さらにROSへフィードバックするシステムを構築している。仮想空間内には、富士山麓の溶岩チューブをもとに作成した地形や、竹中工務店設計によるロボット・コンテナモデルを再現。月面環境下での自律移動や協調行動をシミュレーションできる。
これにより、AI学習用のセンサー情報や地図作成プロセスなどを仮想空間上で検証可能となり、竹中工務店が推進する「ネットワーク知能」の開発と月面探査ミッションの実現に向けた取り組みが加速する見込みである。
Unityによる3Dデジタルツイン技術で構築した仮想空間を開発支援

シリコンスタジオが竹中工務店からの委託により開発支援したシミュレーション環境は、ゲームエンジン「Unity」による3Dデジタルツイン技術で構築した仮想空間である。AIを搭載した小型群ロボットによる月の溶岩チューブ内での探査と拠点建築の実現を目的として、シミュレーションで得られた情報をもとにロボットの研究を推進するために活用されている。
竹中工務店における月のシミュレーション環境の主な用途は以下の3つである。
・ロボット単体および数百台の群ロボットとしての動きの検証
・群ロボットによる地図作成の仕組みの検証
・「ネットワーク知能」と呼ぶAIの学習データの取得および学習した結果の検証
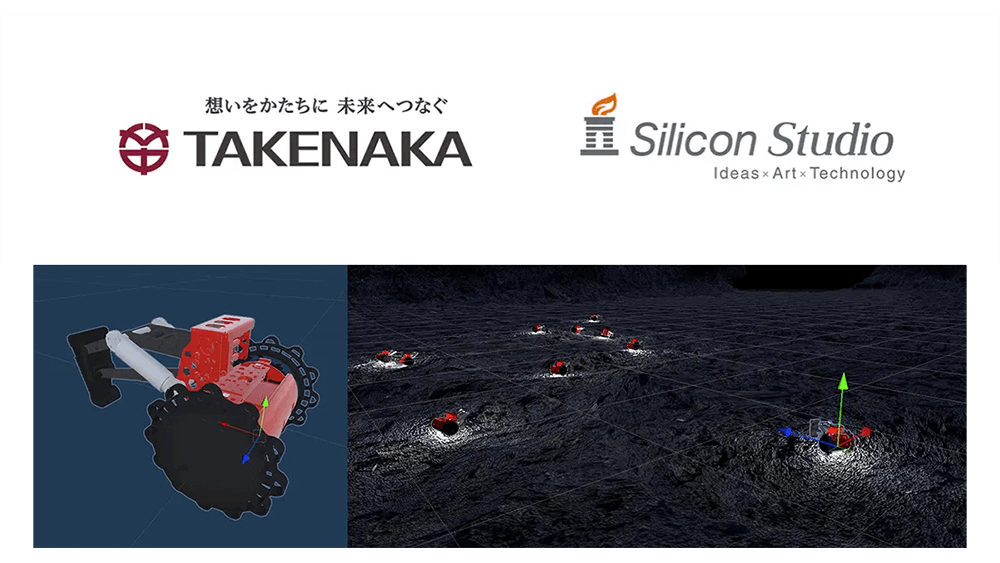
シリコンスタジオが開発支援した月のシミュレーション環境は、UnityとROS(ロボットアプリケーションを開発するためのオープンソースのフレームワークとツールセット)を連携させることにより、複数の小型ロボット群が月でどのような動きをするか検証することができる。ROSによる操作内容を受信して、実物と同様の動きをUnity上で再現し、計算結果をROSメッセージとして送信するシステムである。月と同じ1/6Gの重力環境を再現し、同時に数十台単位のロボットを軽快に動かしてシミュレーションすることができるようになっている。これにより、AI学習のためのセンサー情報やカメラによる撮影データの取得、バッテリー充電システム、月の溶岩チューブ内における地図作成の仕組みなどを、実空間ではなく仮想空間で事前に検証することが可能だ。
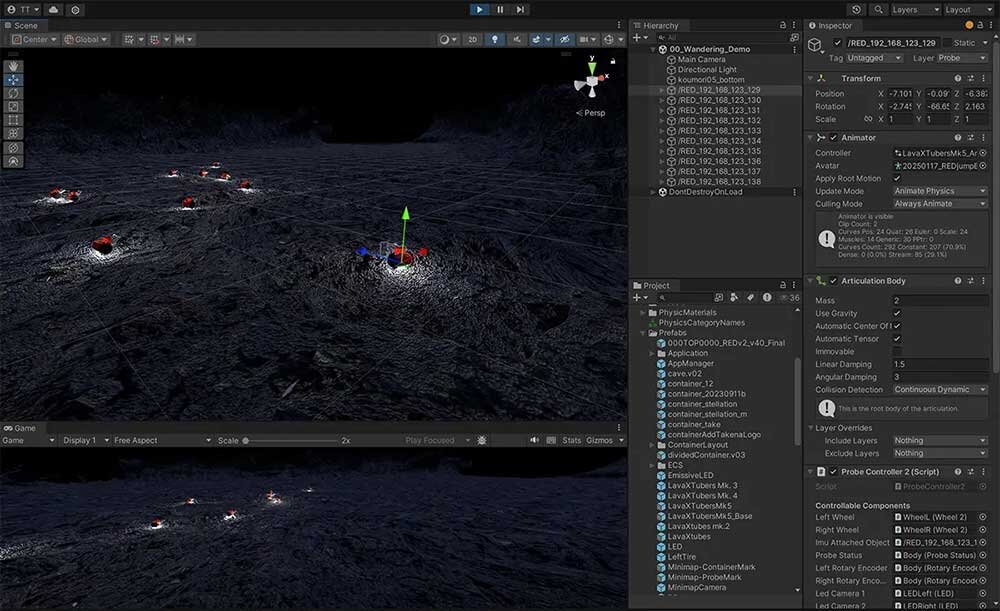
仮想空間内に再現した月の溶岩チューブは、竹中工務店が富士山麓にある溶岩チューブをスキャンして得られた3次元地形データ(点群およびメッシュデータ)を加工してUnityに組み込んでいる。小型ロボットおよびそれらの電⼒や通信を補う星型多面体のコンテナは、竹中工務店が設計したCADデータを3Dモデル化してUnityに取り込み、左右のタイヤの回転によって移動する動きやコンテナを押して回転させる動きを物理計算し、描画している。
-

コンテナを運ぶ小型ロボット群 -
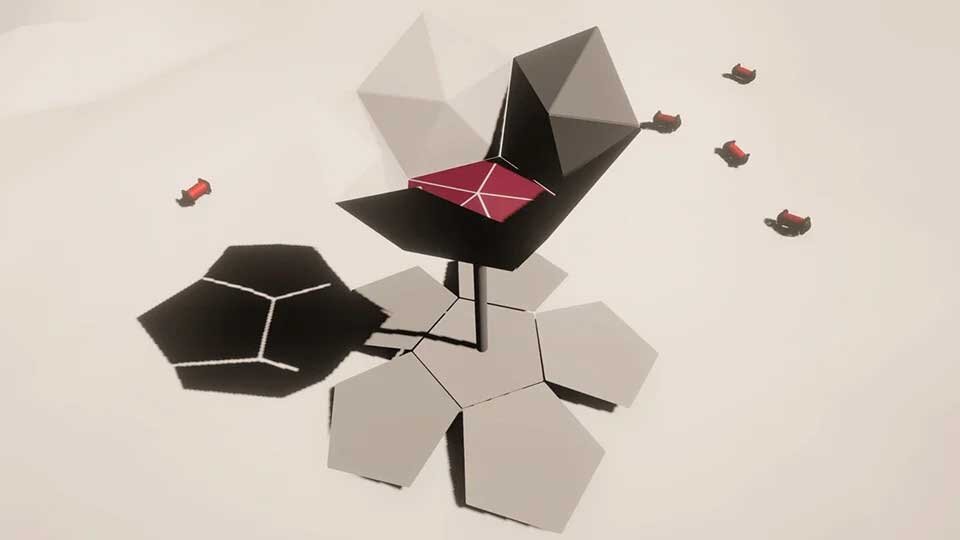
コンテナ展開
竹中工務店 髙井 勇志氏コメント
人類未踏の月の溶岩チューブを探査するために、私たちは「ネットワーク知能」と呼ぶ革新的なシステムの研究開発を進めています。このシステムでは、群ロボットが人の直接的な制御なしに、自律的に組織を形成し、役割を分担しながら探査活動を行います。
今回開発したシミュレータを用いて、ロボットの物理的な動きだけでなく、ロボット同士の協調行動や意思決定プロセスといった社会的な活動を含めたデータの取得や再現を行います。これによって、「ネットワーク知能」の学習と検証を、より実践的な環境で行うことが可能となりました。
このシミュレータを活用することで、開発を加速させ、月面探査の実現を目指して研究開発を進めていきます。
株式会社竹中工務店 技術研究所 未来・先端研究部
主席研究員 髙井 勇志