RESEARCH 1:色名の計算機モデルの確立
・研究目的
コンピュータではRGB値や色相・彩度・明度を指定することで色を表します。一方、日常生活で色を表す場合には赤、オレンジなどの色名によって色を表現します。色名はある特定色を指すものではなく、似た色をひとつにまとめた総称です。つまり、「人間が似ていると思う色のまとめ方」と言えます。一方、似た色領域を選択し処理を施す作業は画像処理で頻繁に行います。例えばPhotoshopの自動選択ツールを使えば似た色領域を少ない手順で自動選択できますが、たまに期待とは異なる選ばれ方になることがあります。こうした問題を解決するために、色名という「人間の考える似た色」概念を、既存のシステムに組み込む必要があると考えました。つまり、類似色判定における人間とコンピュータのちがいをなくしていくために、色名の計算機モデルを確立することが本研究の目的です。
・先行研究
色名と言っても「青」のように誰でも想像できるものから、「蘇芳色(すおういろ)」のように普段なかなか聞かないものまで様々です。また、例えば「カーキ」のように日常的によく使う色名でも、人によって連想する色が異なるものもあります。このように、世の中には大量の色名が存在しますが、大多数の認識の中で共通しているものは意外と少ないです。これに関して1969年に98の言語を対象に大々的な実験が行われ[1]、発達した言語にはどれも11個の基本的な色名が存在し、色空間上での広がりも一致しているとされました。その後の研究でも、人間は概念的に11個の共通した色カテゴリ(基本色カテゴリ)を有するという主張がなされています[2]。この基本色カテゴリの普遍性やモデル化については、未だ様々な研究が行われています[3][4]。
・研究内容
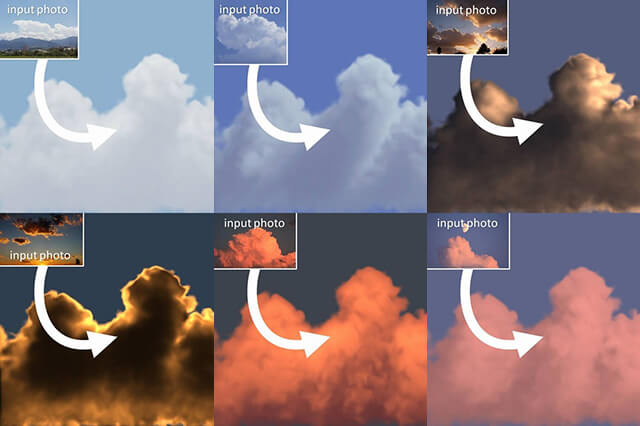
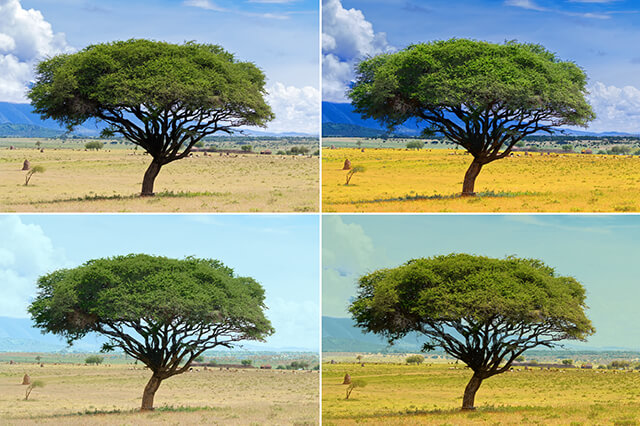
本研究では、色名の色空間上での広がりを調べ、任意の色に対してネーミングできる計算機モデルを確立することを目的としており、そのためには十分なデータが必要となります。そこで、色の見え方に関する被験者実験を行い、色空間上で基本色カテゴリがどのように広がっているのかを調べました。被験者実験は、暗室でカラーキャリブレーションされたモニタを用いて行いました。本研究では、様々な色を使った画像や、自然環境を撮影した写真などでの色の見え方を前提としているため、周辺に様々な色が存在する実験環境を考案しました。実験データ(合計1,254色)に対するネーミングを複数人の被験者に実施してもらう[5]ことで、色空間上での色名の広がりを確認できました。色空間内で最近傍補間を行うことで、任意の色値に対する色名の付与もできました。また、一般的に色の見え方は光源に大きく左右されるため、光源色を変えたときにどう見えるのか[6]、出身国が異なってもネーミングが安定しているのかを調べる実験[7]も行い、光源色や出身国に関わらず、色名の認識は安定しているとの結論にいたりました。
▲実験時の画面構成。11個の基本色カテゴリを用いて、実験データ(合計1,254色)に対するネーミングを複数の被験者に実施してもらいました

▲実験の様子。光源が制御されている暗室の中で、カラーキャリブレーションされたモニタを用いて実験を行いました
・応用の可能性
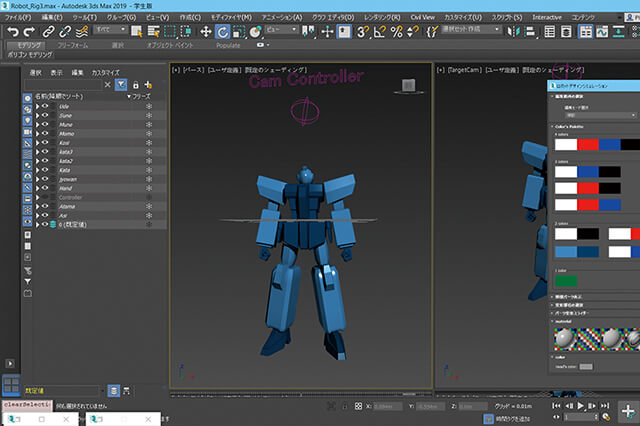
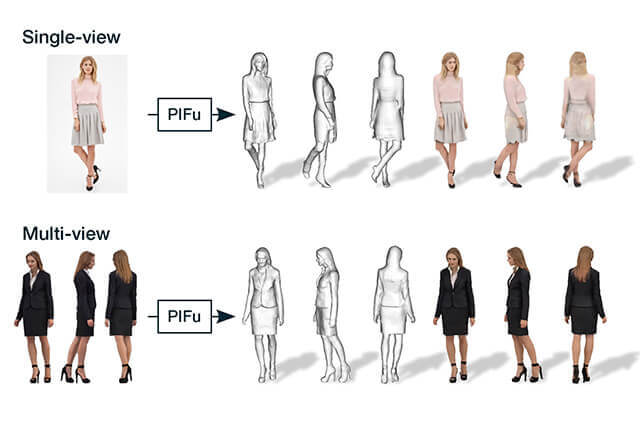
本研究の計算機モデルを用いると、画像内の領域や物体を、RGBではなく色名で指示できます。近年はディープラーニングを用いた物体認識の精度が向上しており、ロボットと自然言語で意思疎通しながら共存できる未来が予想されています。われわれ人間は、日常生活で「あの青いカバンが欲しい」「そこの黄色い箱に入っているよ」といった色名を含む限定指示語を用いて物体を特定することが多いです。そこでこうした色名を含む限定指示語認識と物体認識を統合することで、さらに人間とロボットの会話が自然なものになると期待し、研究を進めています。
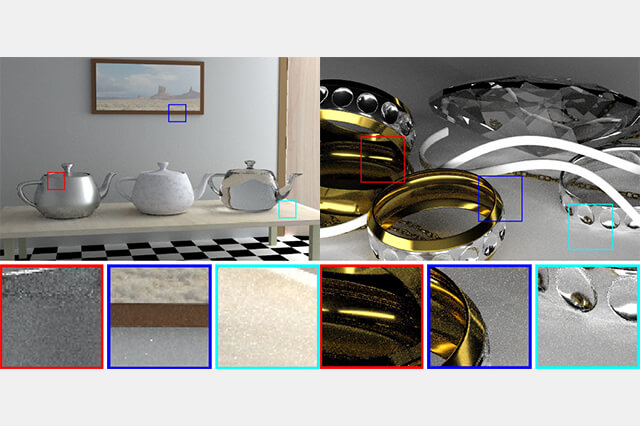
また、色の知覚的カテゴリは「色の類似度」、「色のちがい」を表していることから、例えば色差式に使うことができます。色差は「色のちがいを定量的に定義したもの」で、画像処理における基盤技術のひとつです。しかし、現在標準化されている色差式と、実際の人間の知覚的色差は必ずしも一致していません。この不一致は、色差が大きくなればなるほど顕著になります。そもそも、均等色空間と言われているCIELAB色空間においてさえ、基本色カテゴリの広がりは下図で示すように均等な広がりを見せておらず、空間のユークリッド距離と知覚的色差が合致しません。そこで既存の色差式に基本色カテゴリを組み込むことで、より人間の知覚に沿った色差式を定義することも試みました[8]。
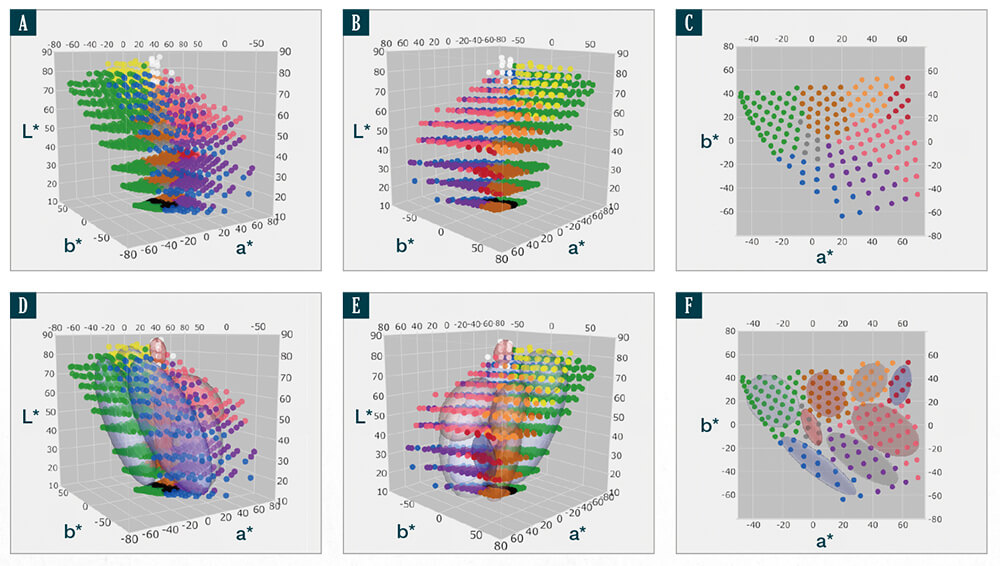
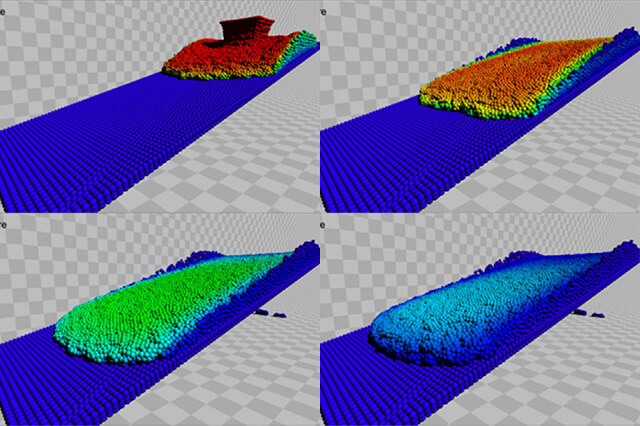
▲【A】〜【C】CIELAB色空間に表示した実験結果。L*軸は明度、a*軸は赤〜緑の色相(プラス方向ほど赤、マイナス方向ほど緑が強い)、b*軸は黄〜青(プラス方向ほど黄、マイナス方向ほど青が強い)です。原点は黒で、L*軸上は無彩色です。色空間内の点は、各色がどの基本色カテゴリでネーミングされたかに応じて彩色されています/【D】〜【F】前述の点を、基本色カテゴリの存在確率楕円体で囲んでいます。CIELAB色空間は均等色空間なので、基本色カテゴリは半径が同じ真球になるかと思いきや、各円の形状や広がる方向は様々です
・今後の課題
色の認識では周辺色の影響を無視できません。特に、白、灰色、黒の無彩色カテゴリは、周辺色の影響を大きく受けるため、どの程度の彩度や周囲環境によって無彩色と認識されるのか、どの程度の色の同化や対比現象が発生するのか、被験者実験を行なっている最中です。こうした問題が解決され、ロボットも人間と同じように「赤!」「白!」と言えるだけでなく「緑だと思ったのに青だった」といった錯視まで起こせる日が来れば面白いなと思っています。
・参考文献
[1]Brent Berlin, Paul Kay, "Basic Color Terms: Their Universality and Evolution", Berkeley & Los Angeles: University of California Press(1969)
[2]Rosch, Eleanor, "Natural Categories." Cognitive Psychology, Vol.4, No.3, pp.328-350(1973)
[3]Nicole Fider, Louis Narens, Kimberly A. Jameson, and Natalia L. Komarova, "Quantitative approach for defining basic color terms and color category best exemplars", Journal of the Optical Society of America A, Vol.34, Iss.8, pp.1285-1300(2017)
[4]Radek Ocelák, ""Categorical Perception" and Linguistic Categorization of Color", Review of Philosophy and Psychology, Vol.7, Iss.1, pp.55-70(2016)
[5]Youngha Chang, Suguru Saito, Keiji Uchikawa, Masayuki Nakajima, "Example-Based Color Stylization of Images", ACM Transactions on Applied Perception, Vol.2, Iss.3, pp.322-345(2005)
[6]岡村光展, 張 英夏, 齋藤 豪, 川上一郎, 高橋裕樹, 中嶋正之, "異なる光源下におけるフォーカルカラー選定の変化に関する研究", 第二回デジタルコンテンツシンポジウム講演予稿集(2006)
[7]張 英夏, "カテゴリカルカラーに関する文化比較:日本語・韓国語・中国語における基本色カテゴリの比較", 21巻, 4号, pp.211-214(2009)
[8]張 英夏, 向井信彦, 中嶋正之, "カテゴリカル色知覚を考慮した色の類似度定義に関する一考察", 映情学誌, Vol.67, No.3, pp.J116-J119 (2013)