13回目を迎えた日本最大級のCGカンファレンス「CGWORLD 2023 クリエイティブカンファレンス」(CGWCC)。全36のセッションが配信され、注目作品のメイキングから最新の技術やテクニックに関する情報まで、幅広い話題で盛り上がりを見せた。本記事では「『ハリウッド×日本』クリーチャーアニメーション自主制作メイキング」の模様をレポートする。
関連記事
・フジモトタカシ氏によるフォトリアルなプロモーション映像制作術―BlenderとSubstance Painterを用いたワークフロー ~CGWCC 2023(1)
・Cinema4D+Redshiftで生地の触感を視覚化、UNIQLOのカーディガン&ジャケット紹介映像メイキング ~CGWCC 2023(2)

リアリティのあるクリーチャーのつくり方
本セッションにはILM(Industrial Light & Magic)クリーチャー・アニメーターの島田竜幸氏、フリーランスのデジタルアーティスト兼キャラクターデザイナーの森田悠揮氏、リブゼント・イノベーションズ株式会社BACKBONE事業部リグコンサルタントの福本健太郎氏が登壇。『センザンコウ×サーベルタイガー』のムービー制作のメイキングを紹介した。
Personal Animation project!!
— たつ Tatsu クリーチャーアニメーター 島田竜幸 (@tatsuyuki14) May 8, 2023
怪物の喧嘩!
森田さん @YuukiM0rita のセンザンコウ×サーベルタイガーmodelを
福本さん@kentaLOW12345 にrig組んでいただいて魂吹き込みました!
お二人共どうもありがとうございます!
ゴリゴリ動かすの楽しかった!!#エイド講座クリーチャー https://t.co/VC7pzjgUyZ pic.twitter.com/ul36YM3xYV
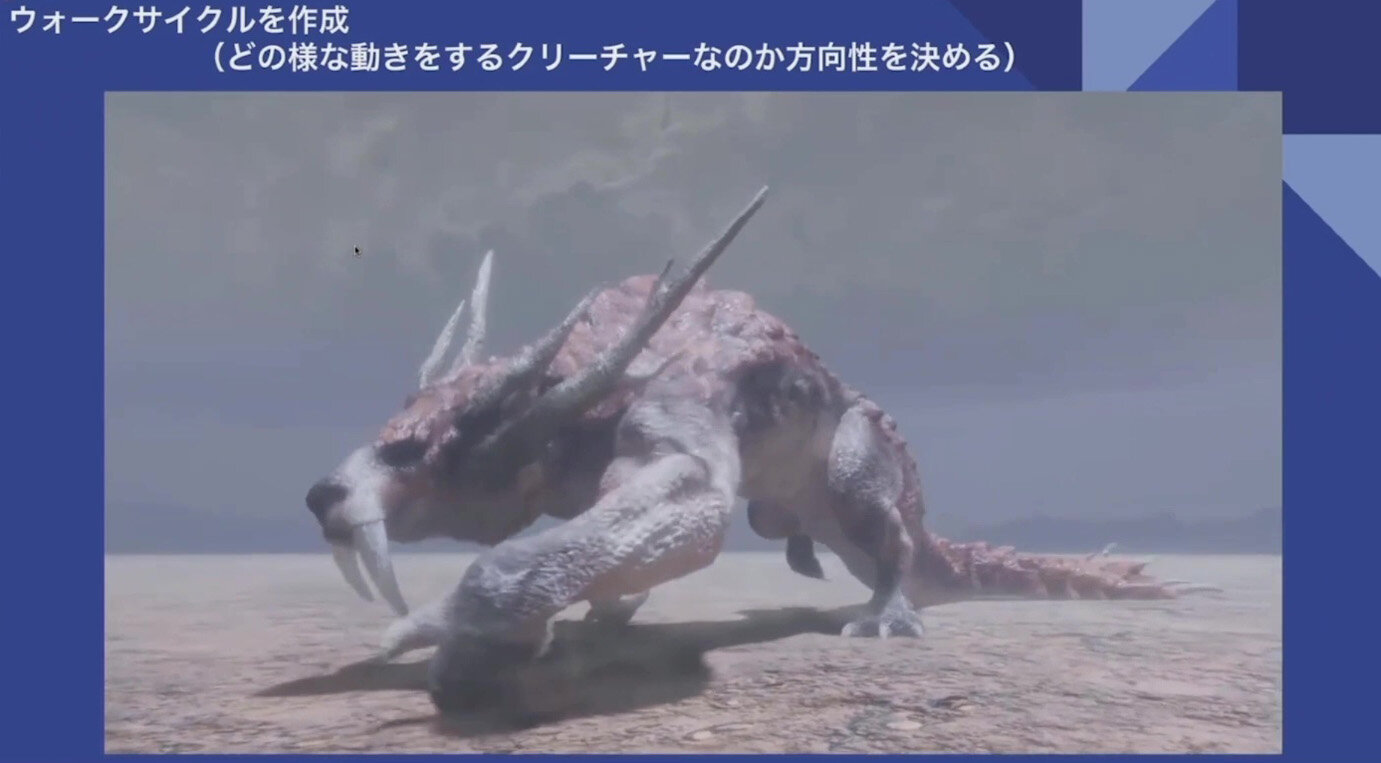
今回の企画は、森田氏がX(旧Twitter)に投稿した『センザンコウ✕サーベルタイガー』の静止画作品が発端となっている。『センザンコウ✕サーベルタイガー』は、全身を固い鱗で覆われたセンザンコウと、鋭い2本の牙をもつネコ科のサーベルタイガー、2体の哺乳類をかけ合わせたクリーチャーだ。
これを見た島田氏が「アニメーターとして動かしてみたい」と感激し、面識がなかったにも関わらず森田氏にオファーして、モデルデータを提供してもらった。ただモデルにはリグが組み込まれていなかったため、ポリゴン・ピクチュアズ在籍時に先輩だった福本氏にリギングを依頼した。モデラーとリガーの2人のクリエイターの協力を得て、ムービーの制作が始まった。
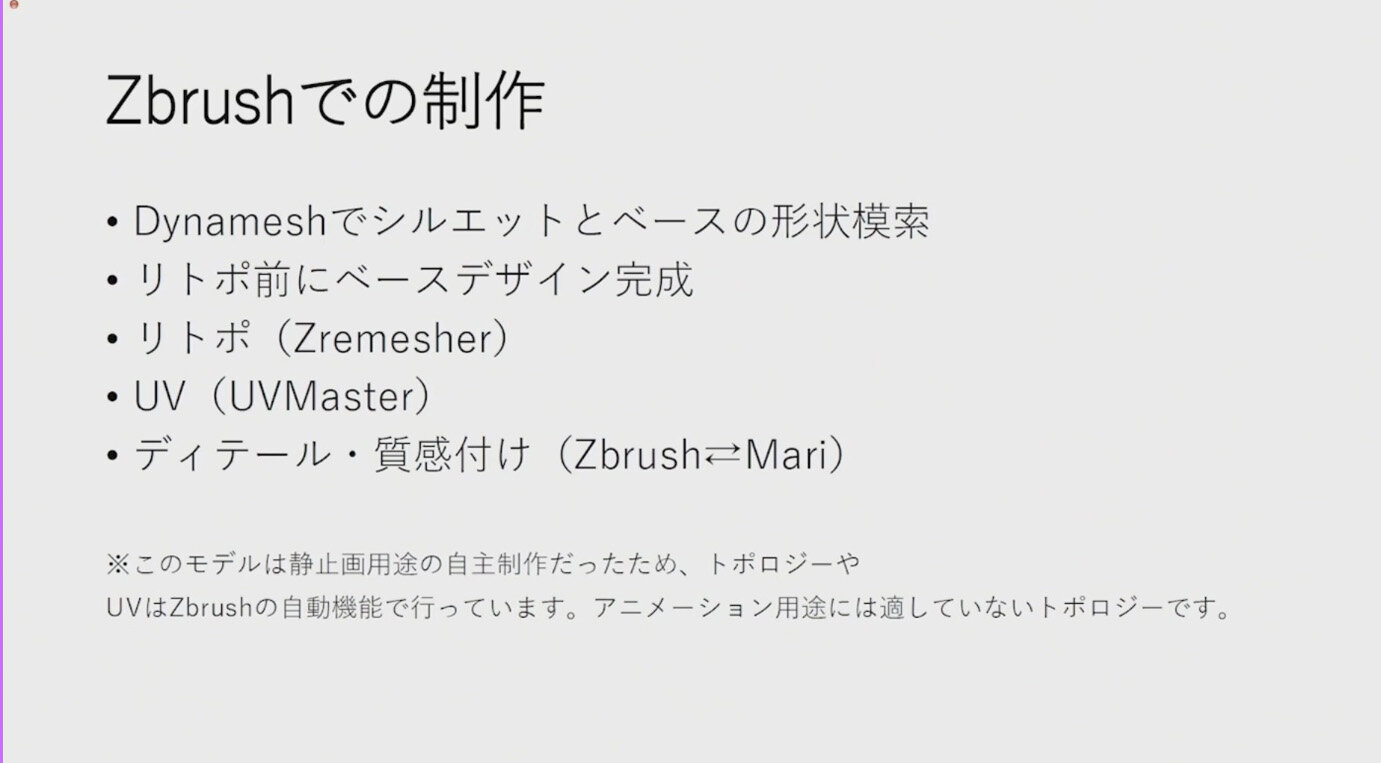
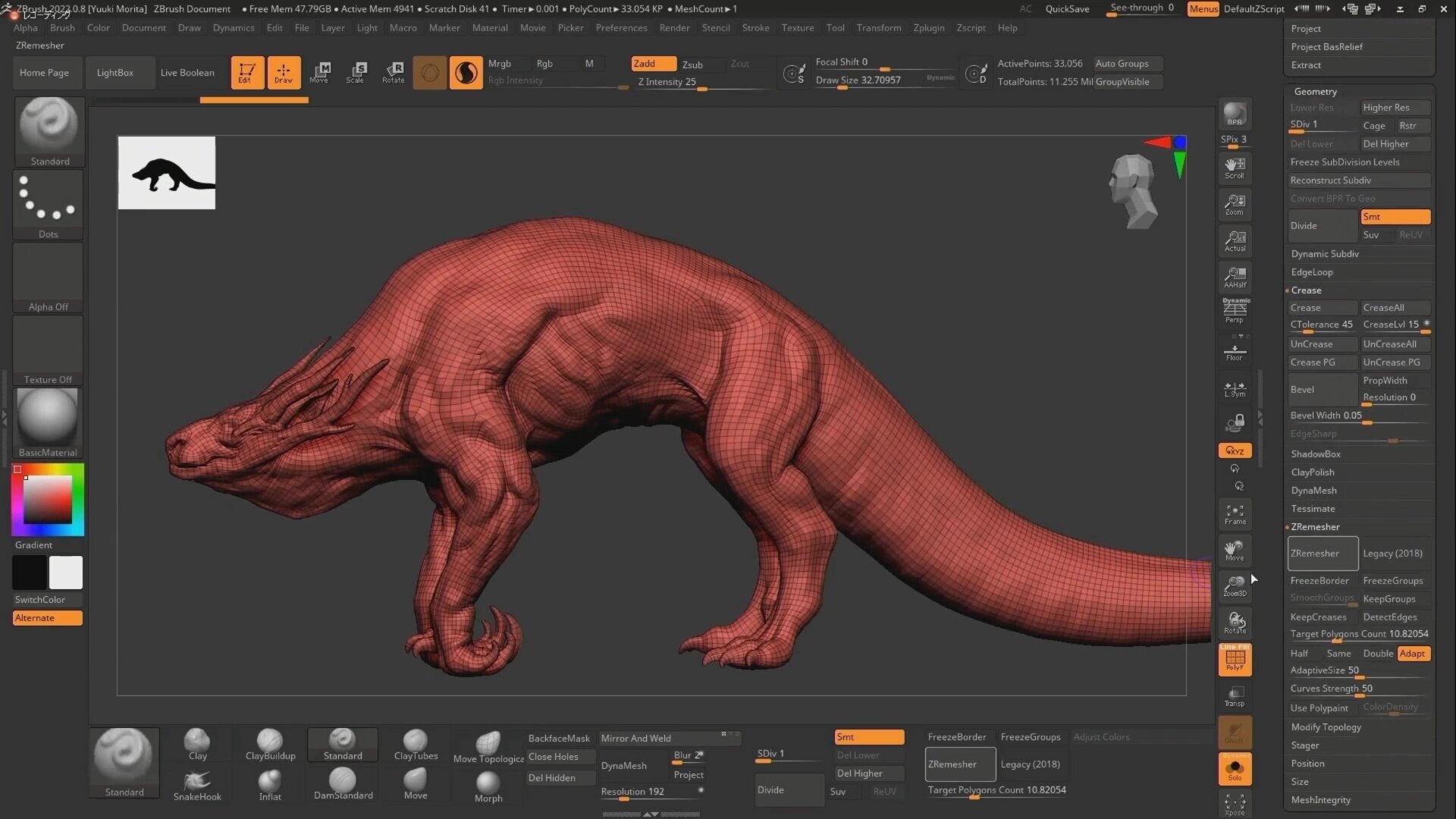
セッションではモデリング、リギング、アニメーションの各工程について、それぞれワークフローが解説された。まずは森田氏がZBrushを用いたクリーチャーデザインのテクニックを解説した。
センザンコウ×サーベルタイガー
— 森田(悠) (@YuukiM0rita) April 17, 2020
質感付いてるVr.#ZBrush pic.twitter.com/pNEbSrSJWK
森田氏はデザインをする上で、最初に「どういうキャラにするか?」を考えていると言う。まずはキャラクターの性格や印象を第一に考えて、カッコイイのか可愛いのか、それとも怖いのかといった印象を固めていくそうだ。そこからどのような動作や生態をしているのかを掘り下げていけば、使うべきシルエットが必然的に決まると言う。

例えば台形をシルエットに使う場合は、動きが遅くて重心は下半身にあるパワー系のキャラクターになり、シルエットが丸の場合は可愛らしい雰囲気が生まれる。トゲトゲなら攻撃性の高い凶暴さが前面に出るだろう。このようにキャラクターの性格や印象からスタートして、具体的な内容を掘り下げていくフローとなっている。
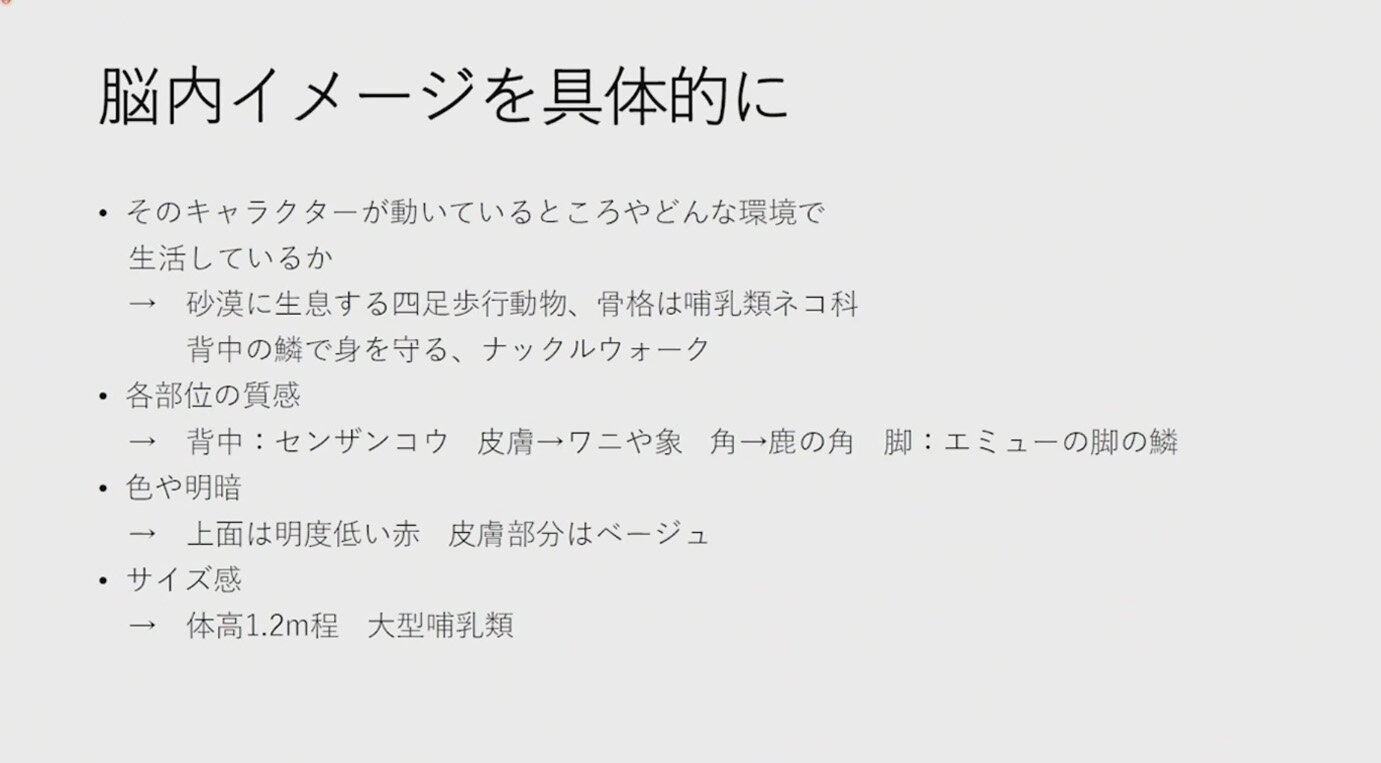
シルエットが決まったら、脳内イメージをさらに固めていく。キャラクターだけでなく、そのキャラクターが存在している環境まで想像できると、より説得力が生まれる。『センザンコウ✕サーベルタイガー』では骨格や各部位の質感はもちろん、砂漠に生息していることや、ナックルウォーク(※)で歩くことなどもモデリング前に考えていたそうだ。そうした構想に合わせて、リファレンスを収集していった。
※ゴリラやチンパンジーなどに見られる、手を握り指を折り曲げたまま地面につける四足歩行の一種
第1段階のモデル

第2段階のモデル
-

▲指をつくり込んでおり、腰の位置も調整してあるものの、筋肉はまだつくり込んではいない。顔の造形も模索中 -

▲斜め位置。最終的に1枚画として出力する想定だったため、見映えのする角度を探っている
第3段階のモデル
-

▲この段階から筋肉をつくり始めており、シルエットも若干の変更を加えた -
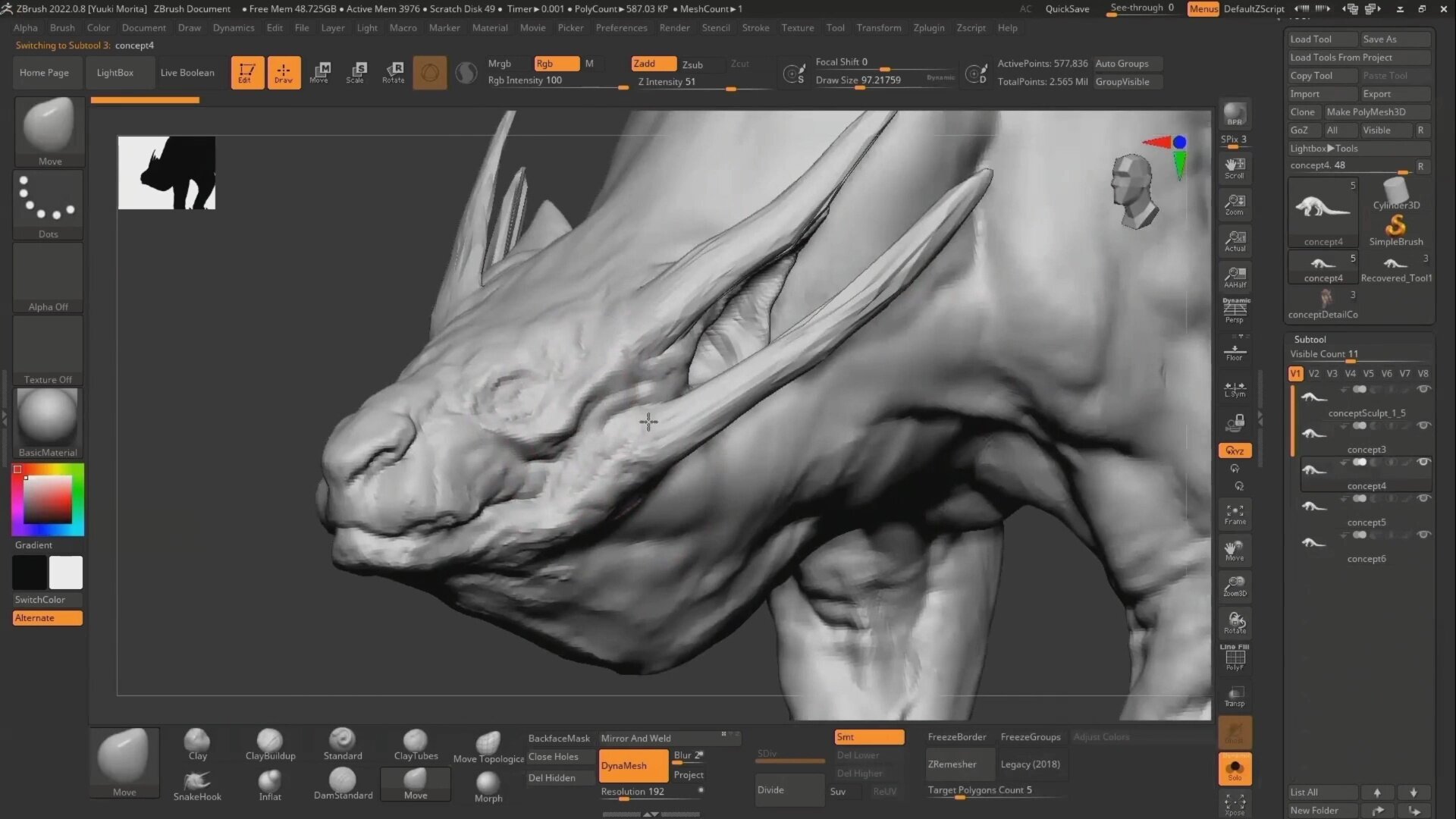
▲顔のアップ。顔は骨格ベースで、目の位置やサイズ、角の生え方、顎のラインなどを微調整した。なおブラシはMoveブラシとClayBuildupの2種類をメインに使用した
第4段階のモデル
-

▲顔のディテールがアップしている。森田氏は顔からつくり始めることが多いとコメント。顔の印象が定まると、全体の印象も自然と決まってくるそうだ。第4段階では、顔の印象や筋肉構造、皮膚の分厚さなどを決めていくが、シルエットの雰囲気は崩さないことが重要。「第1段階や第2段階のレベルで、全体のシルエットは決定しておいた方がいいですね」(森田氏) -

▲角のアップ。角の枝分かれはSnakeHookブラシを使用。DynaMeshと併用することで、ポリゴンの流れなどを気にせずに枝を生やせる
第5段階のモデル
-

▲第4段階と第5段階の尻尾の比較。こちらは第4段階 -

▲こちらは第5段階。第5段階では尻尾の皮膚を追加した。わずかな差ではあるが、クリーチャーを手がける上では微妙な凹凸が自然に見せるためのテクニックなので、慎重にデザインしていく
-

▲背中の鱗を追加 -

▲鱗はVDM(Vector Displacement Mesh)ブラシで、3DのAlphaを使用。登録した鱗のメッシュを1枚ずつ配置していった
-

▲最後に皮膚のディテールを追加。鱗やシワのAlphaを何種類か用意して、メッシュ上にドラッグして配置していく -
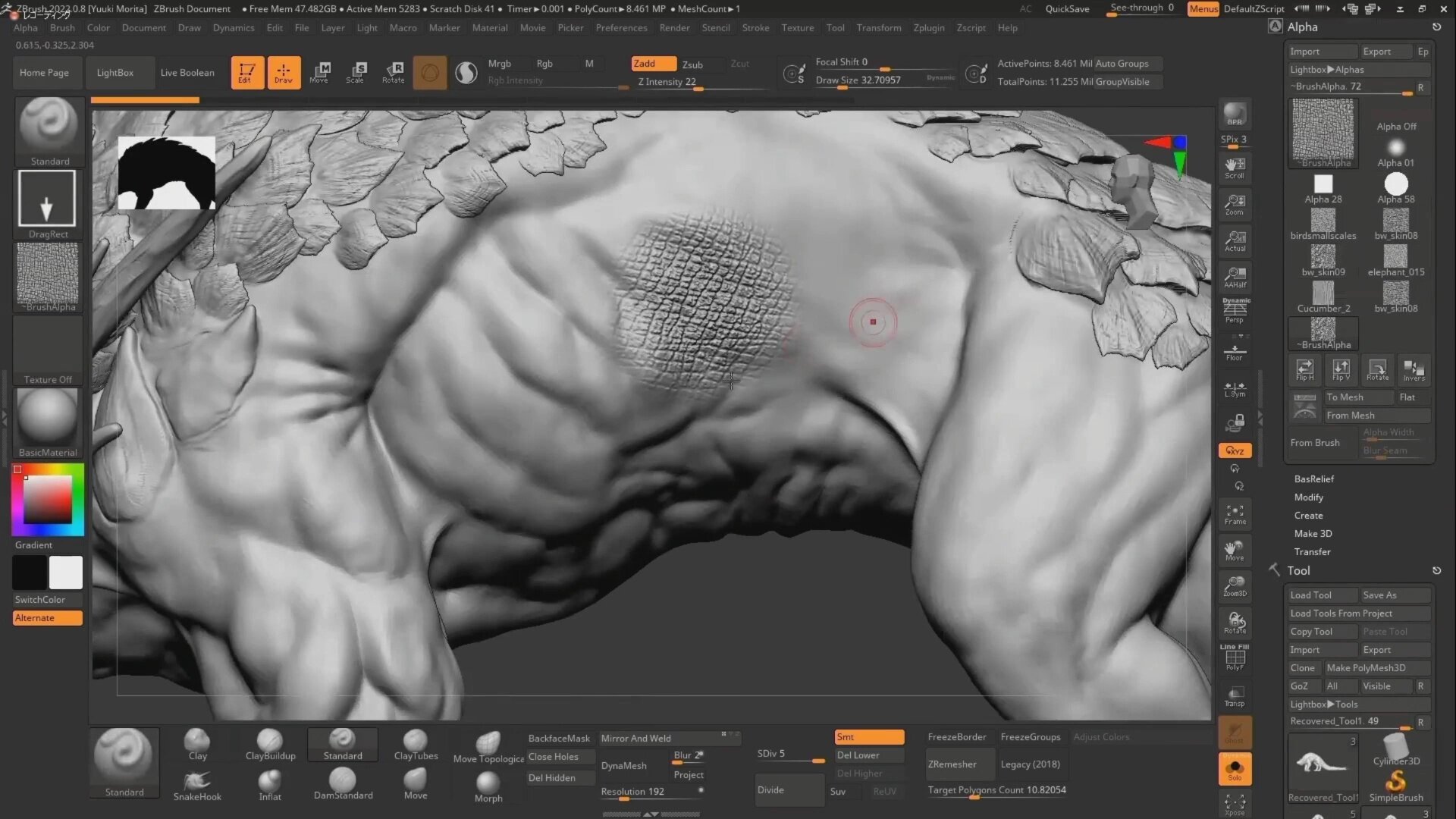
▲鱗やシワのAlphaAlphaが1種類だけでは不自然に見えてしまうため、よく動く関節周りは深いシワ、あまり動かない部分は固そうな皮膚に見せるなど、部位ごとの使い分けがリアリティを生む決め手になる。Alphaを貼った後は、DamStandardブラシなどを使って手作業でブラッシュアップした
完成モデル


リグも生態調査からスタート
モデリングの次は、福本氏によるリグの解説が行われた。リグの設定にあたって、福本氏はクリーチャーのモチーフになったセンザンコウとサーベルタイガーの調査から始めたと言う。
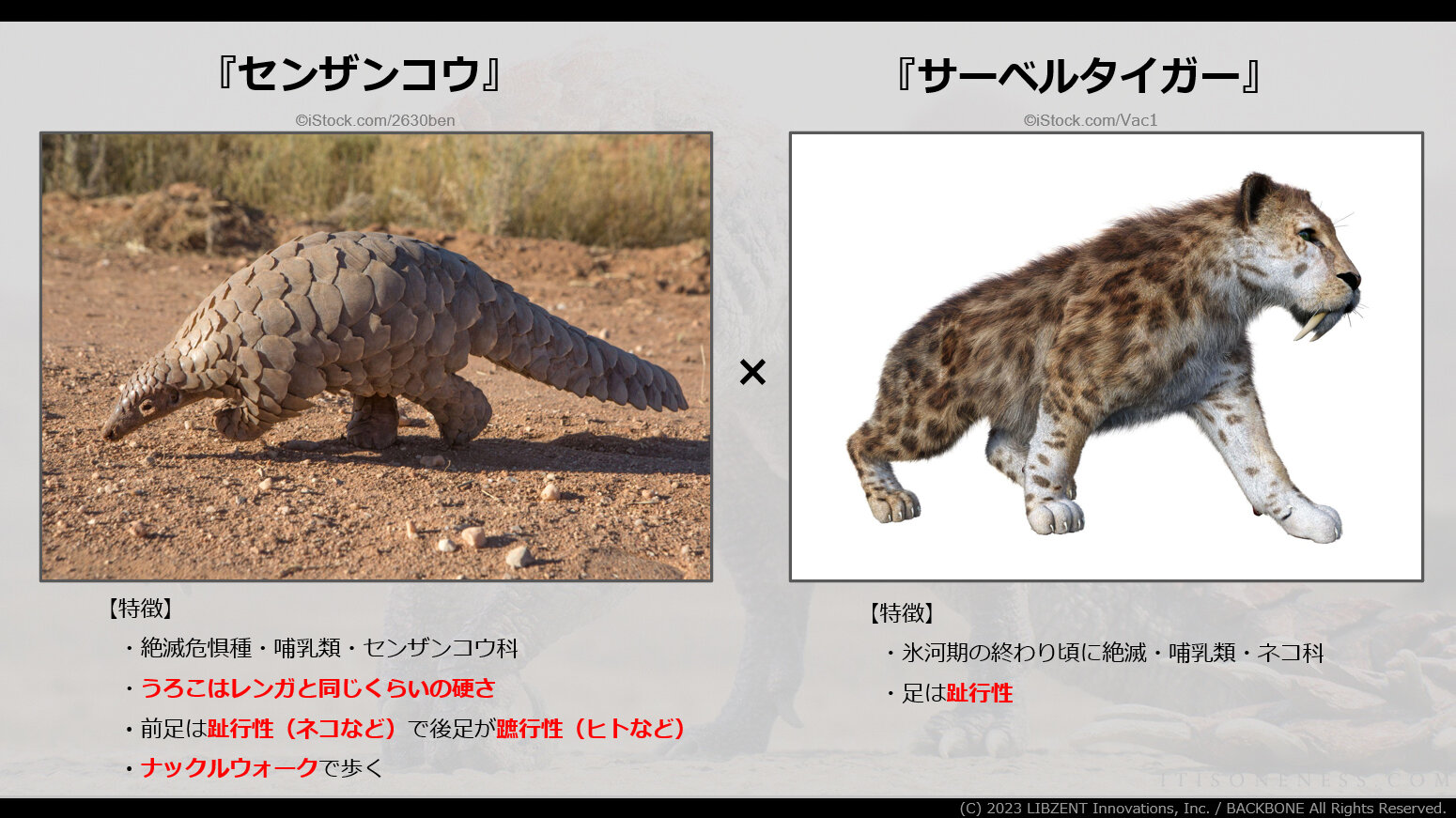

その結果、クリーチャーは筋肉と後ろ脚がサーベルタイガー、それ以外の部分はセンザンコウの要素をもつだろうと推測。最大の特徴は前脚で、ナックルウォークで歩くため手の甲に体重がかかり、それゆえ前傾姿勢で歩くだろうと考えた。
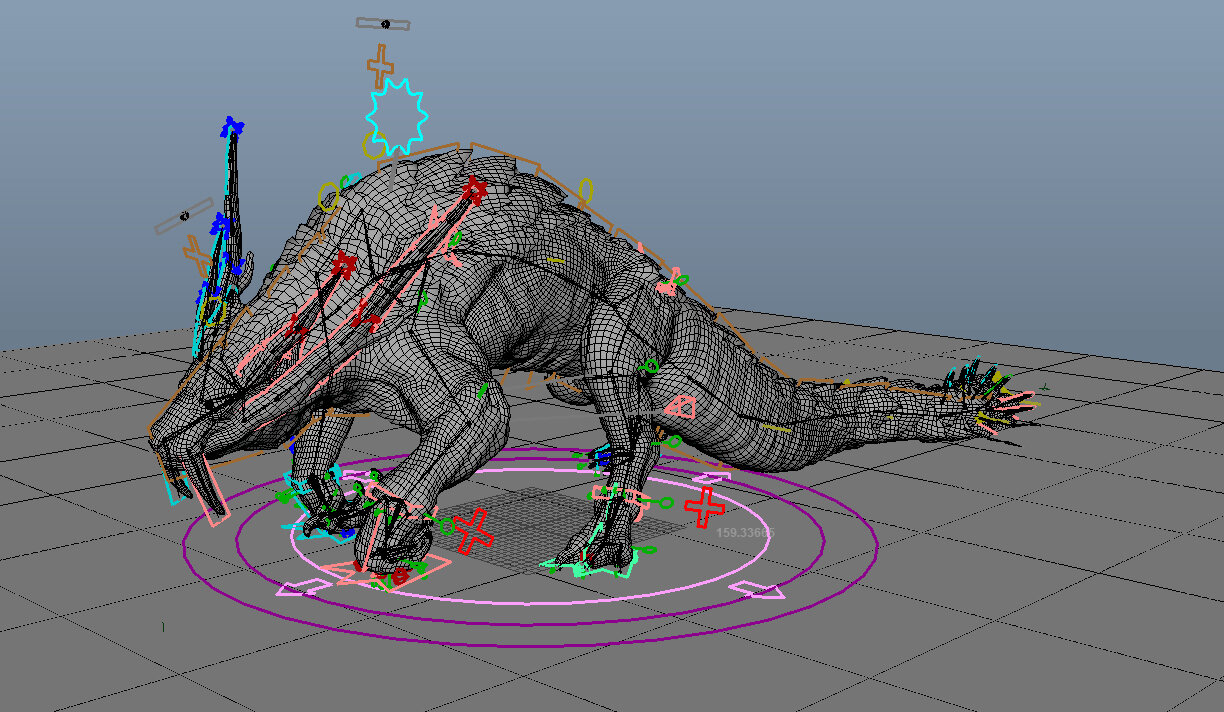
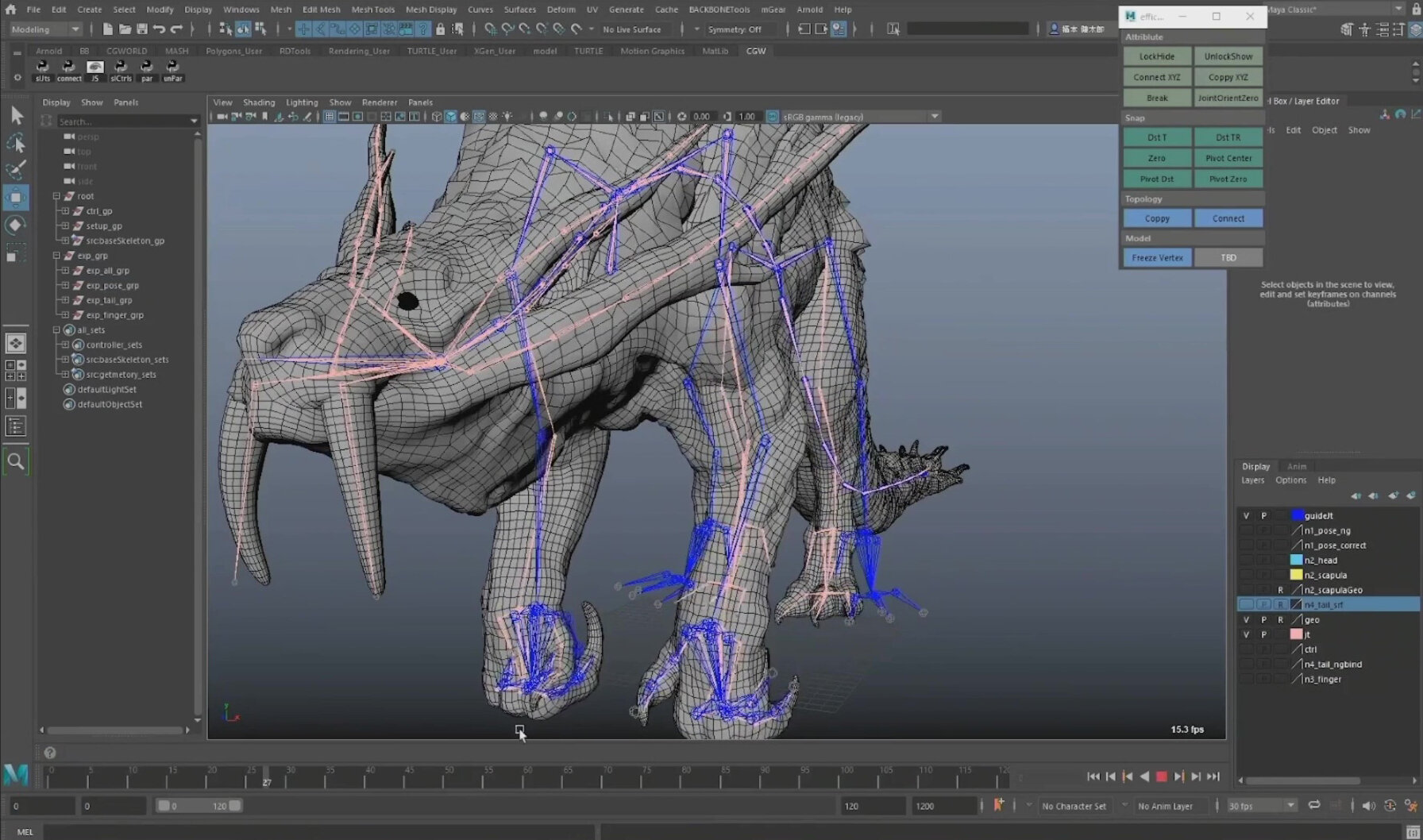
続いてMayaの作業画面を見ながら、森田氏から提供されたモデルについて解説した。
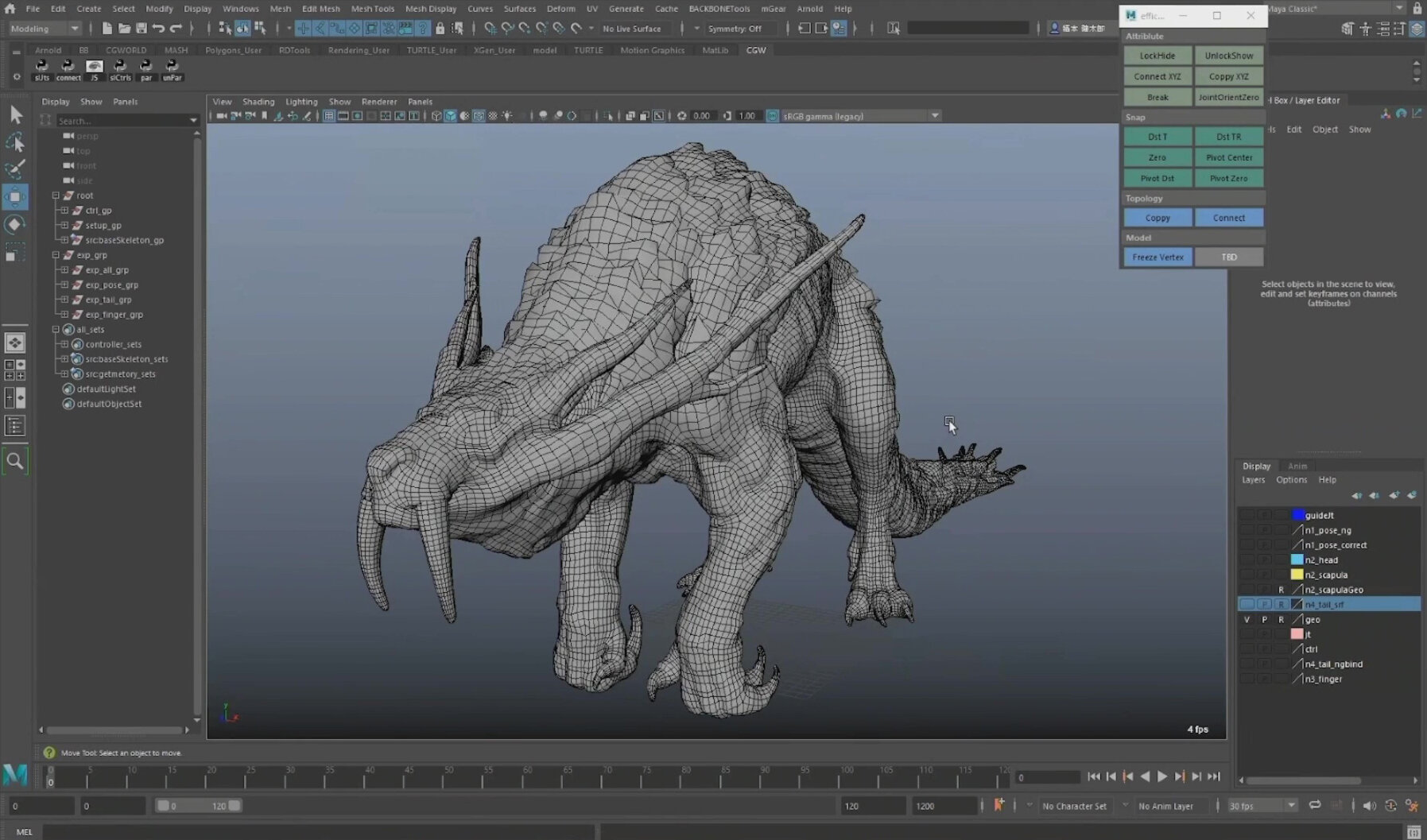
-

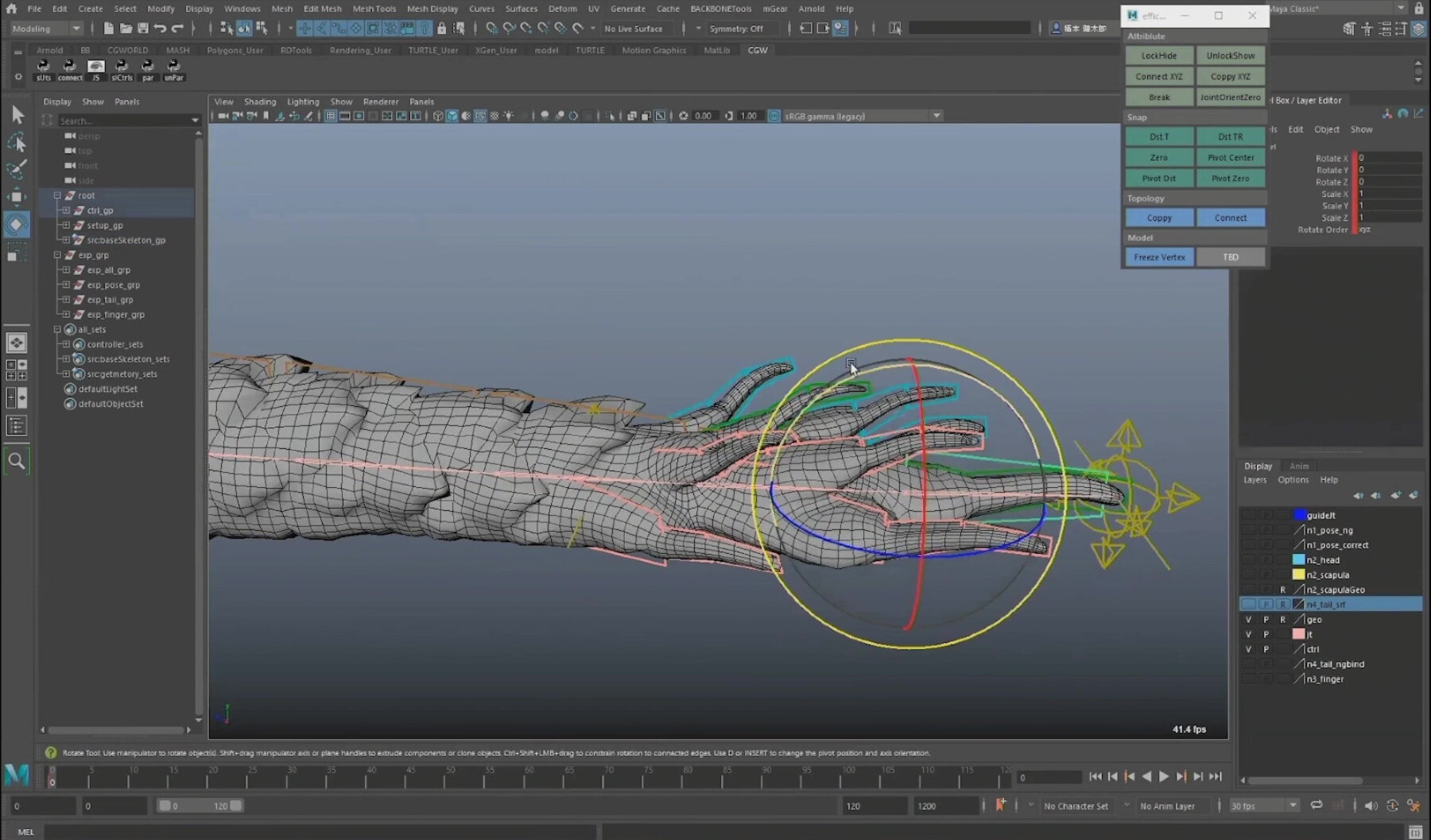
▲『センザンコウ✕サーベルタイガー』の脚 -
▲踵が浮いており、趾行動物に分類される
リグを組む上では、最初にIKをどこに打つのかを考える必要がある。四足歩行の動物の直立・歩行にはいくつかのパターンがあり、クリーチャーであってもその分類がわかれば、IKをどの位置に打つべきなのかは決まってくる。ただし今回は両脚の関節に角度が付いているため、リグを組み込む難易度が高かった。
もし仕事であればモデラーに修正を依頼することもできたが、今回は自主制作作品である。森田氏にはモデルを提供してもらっている立場であることから、そういったお願いは控えたいという気持ちがあったという。そこで現状のデザイン性のあるポーズのモデルのまま、工夫を凝らしてリグを組むことが福本氏の課題になった。
リギングの手順
-

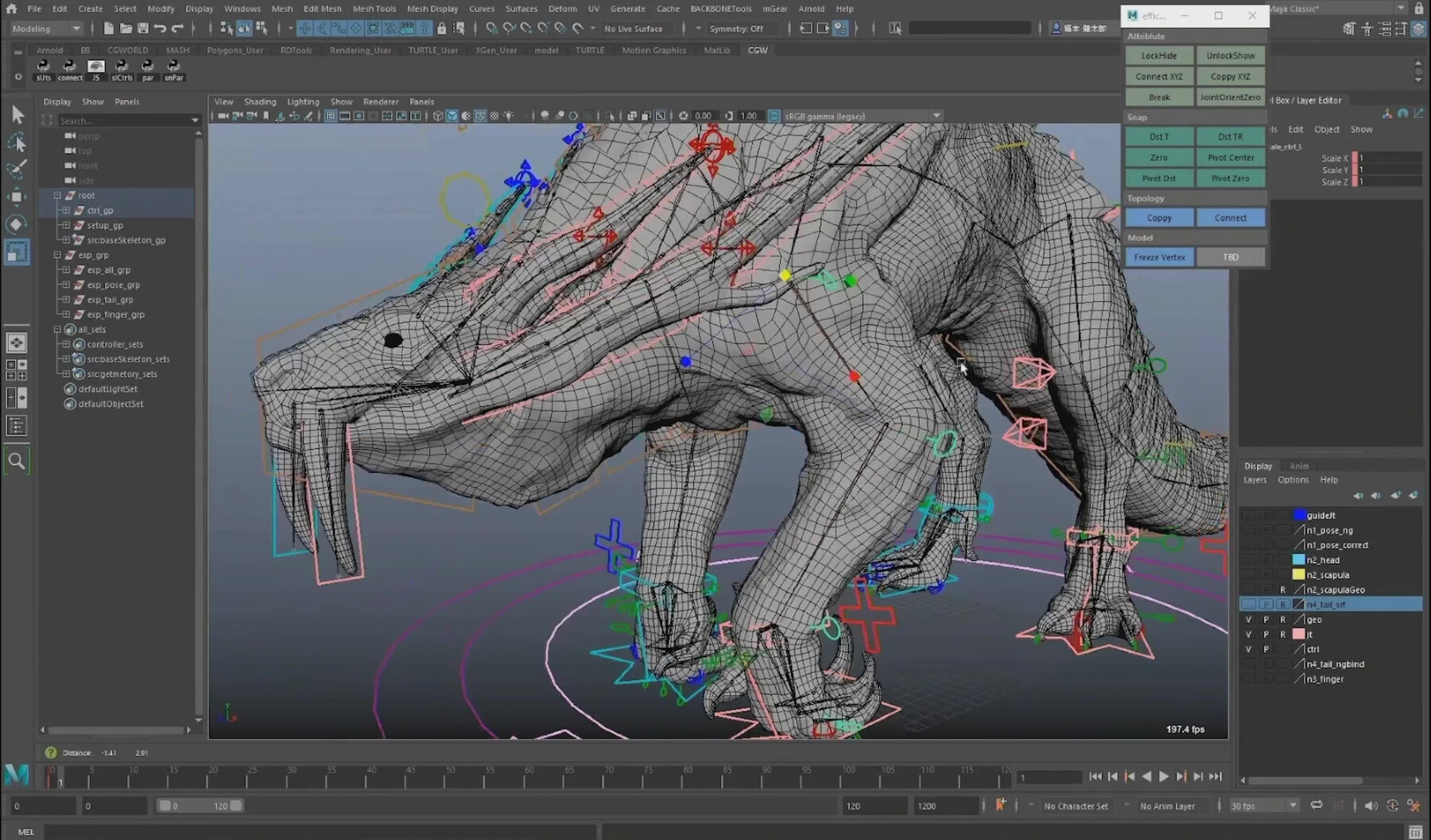
▲まずは解剖学に沿ってガイド骨を配置、バインドにはこの骨を使用する -
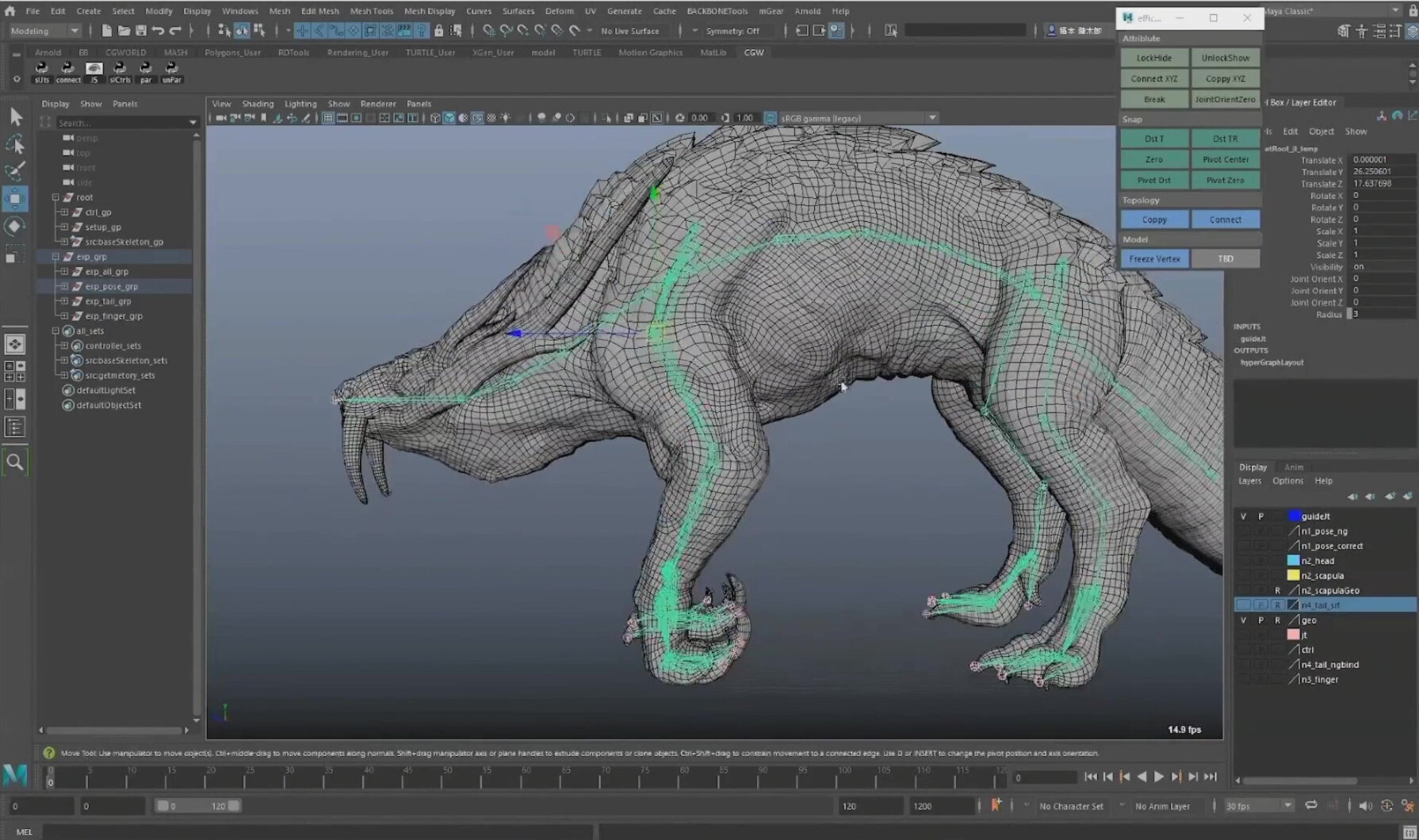
▲四足歩行の動物の場合、ルートは腰側に設定することが多いが、前傾姿勢のクリーチャーのため首の根元に配置した
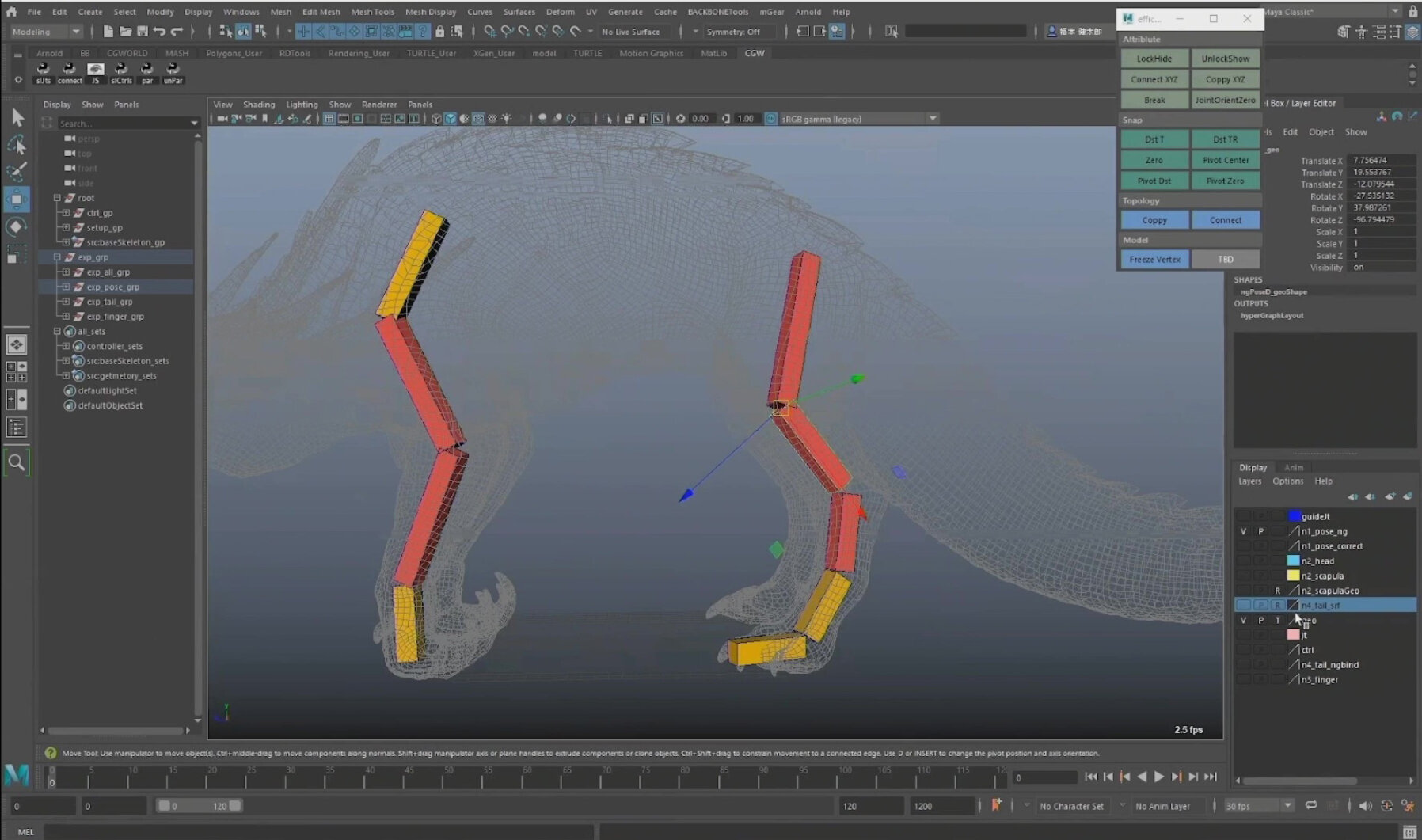
-
▲バインド用の骨は形状に合わせて骨を配置しているため、腕と足に角度が付いている。このポーズではIKを設定できないため、ガイド骨を複製してコントローラ用の骨を作成する。複製した骨は関節が真っ直ぐになるように調整し、コントローラを設定する上で最適なポーズにする -
▲この状態でローテーションが初期ポーズとしてゼロになるように設定。コントローラも初期値がゼロの状態になるようにした
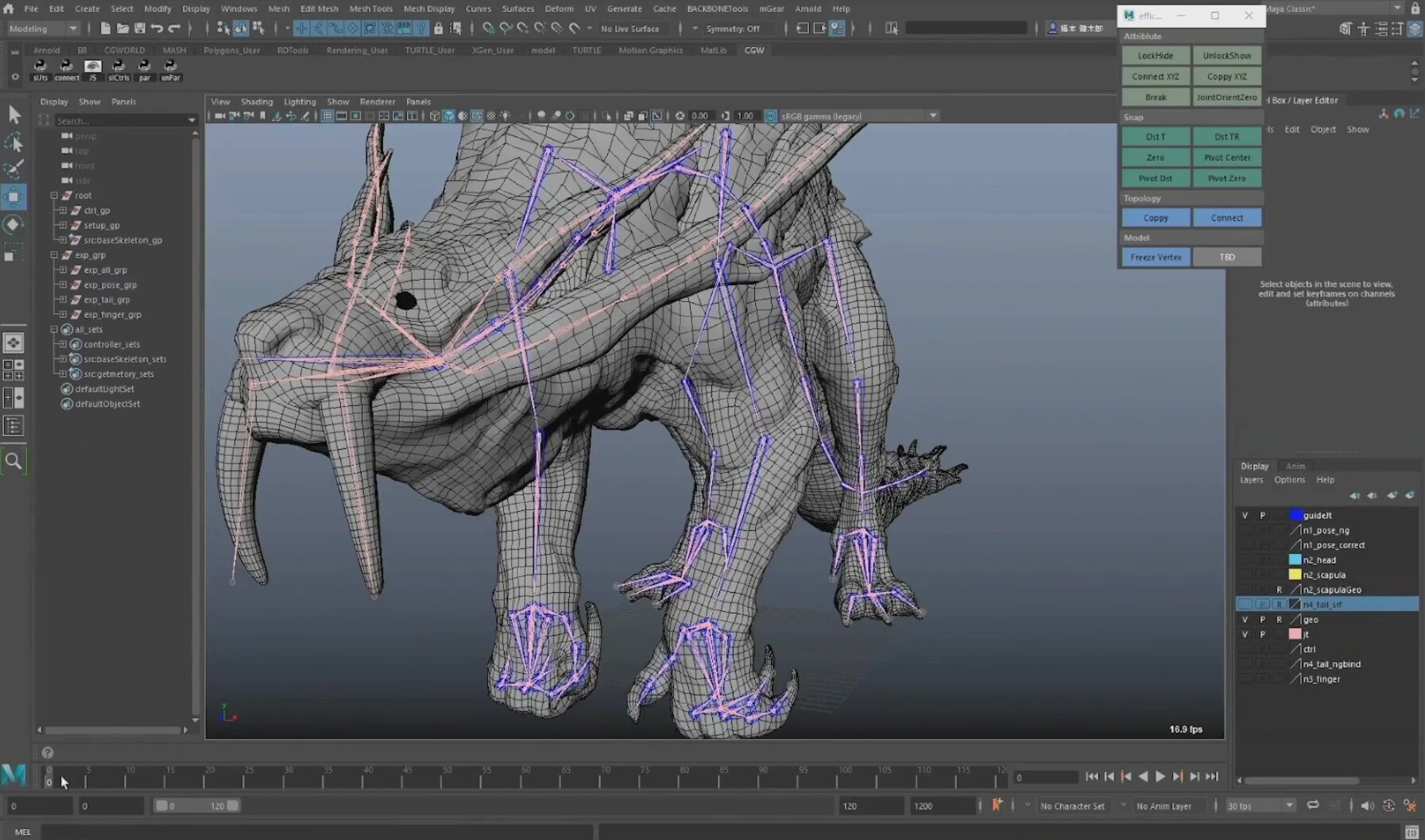
-

▲その後、ガイドの骨を基にして…… -

▲角度とコントローラの位置を逆計算し、元のポーズに戻す。バインド骨とコントローラ骨はコンストレインで接続する
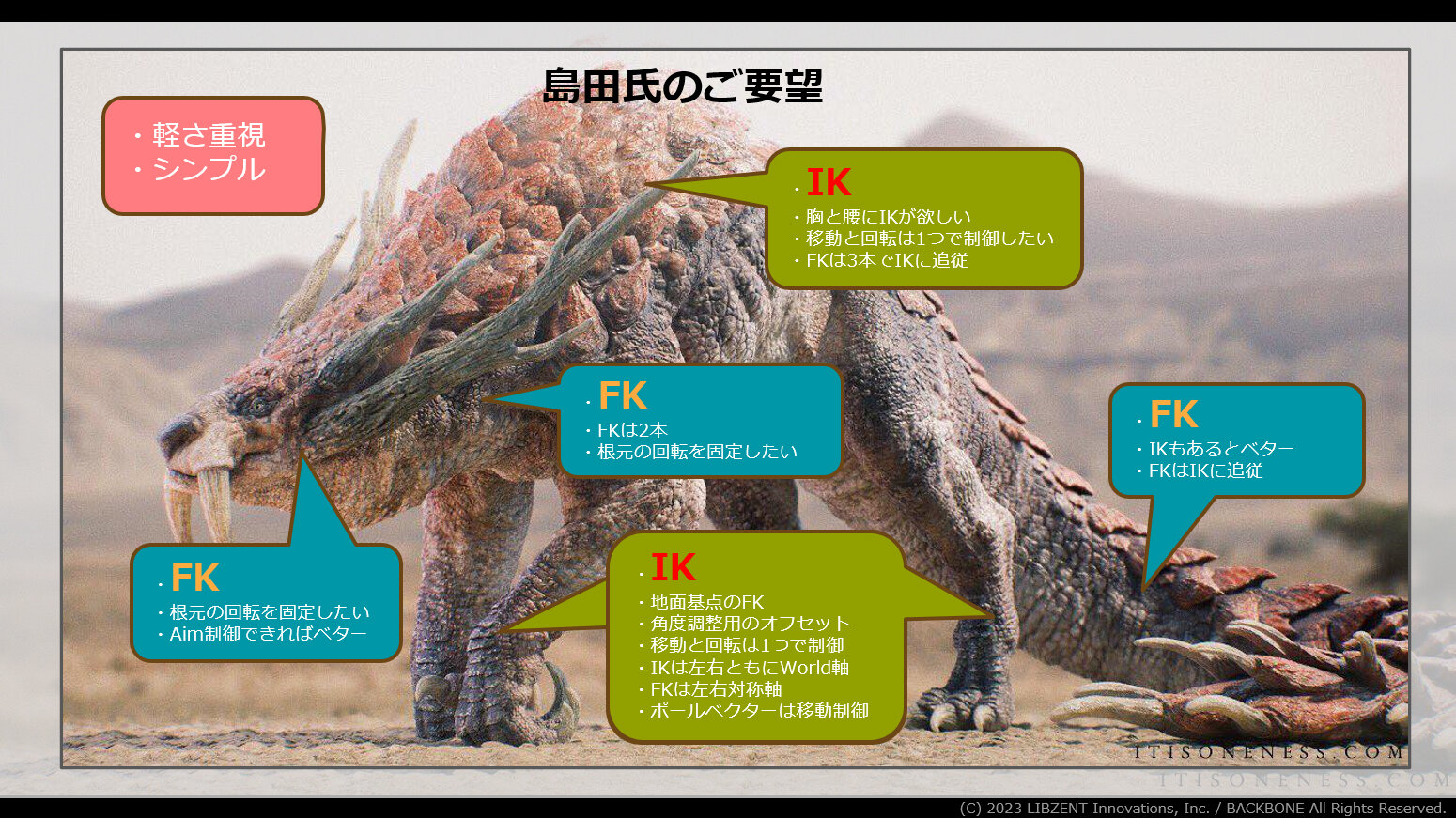
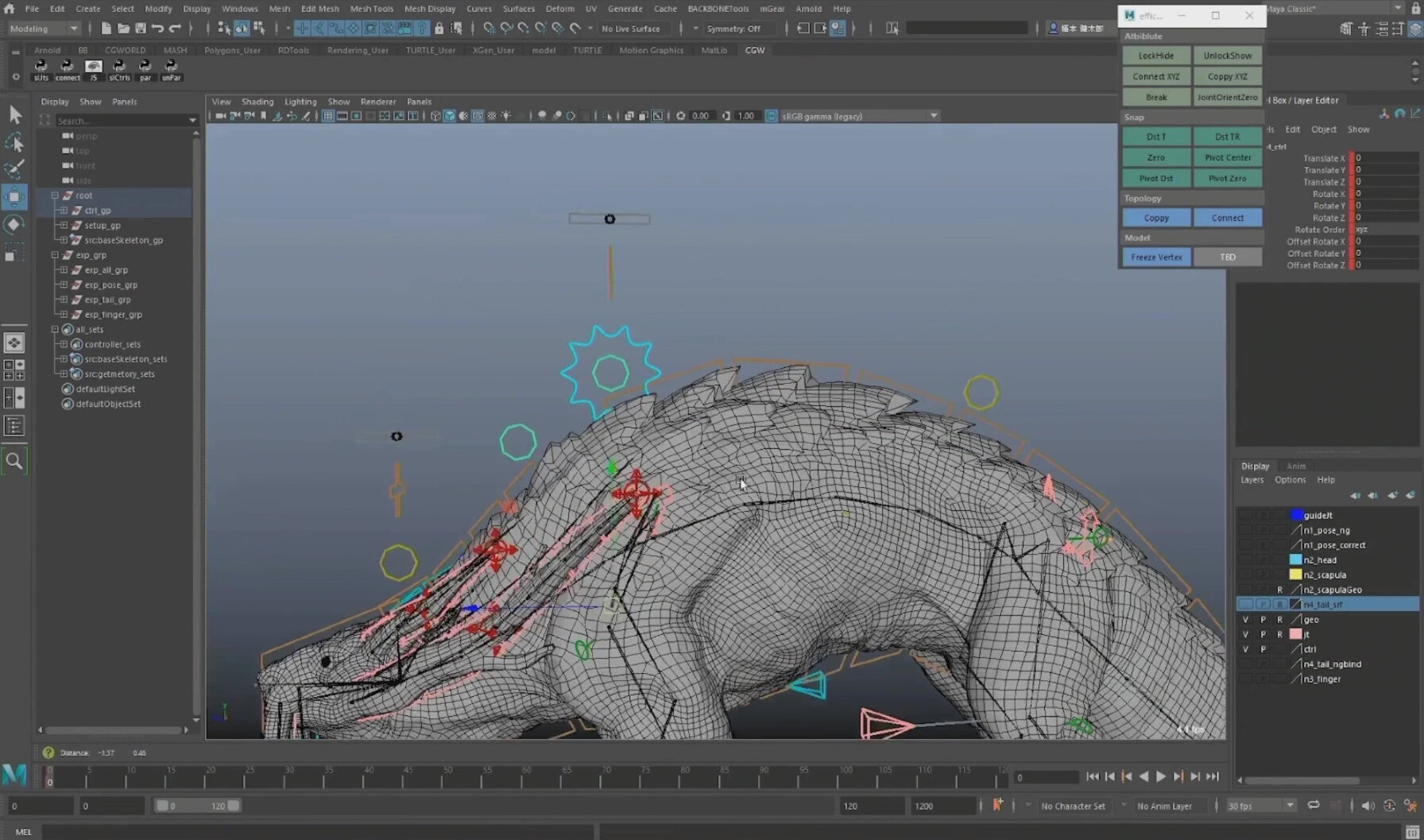
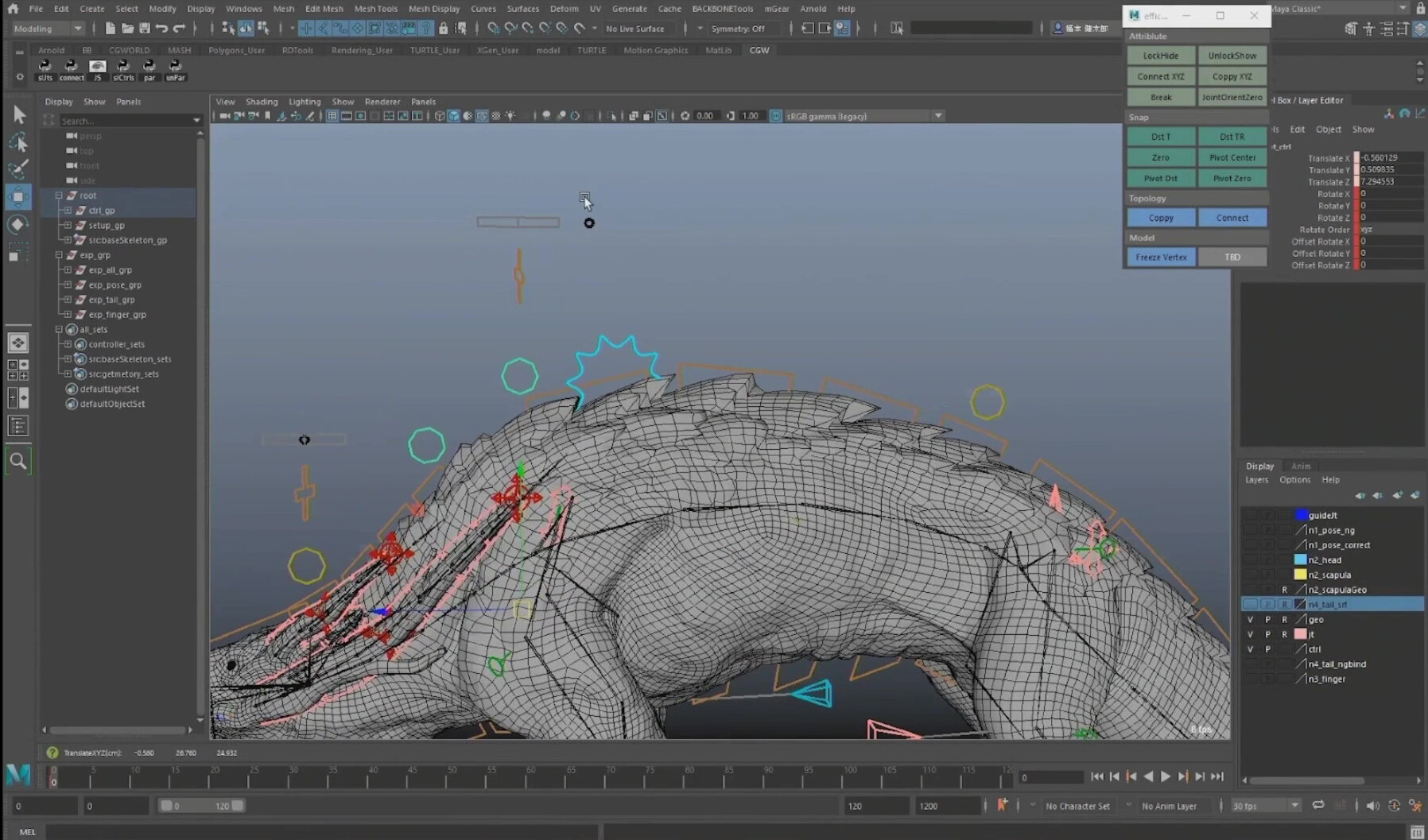
後半は各コントローラが紹介された。上半身はIKとのリクエストだったため、トランスとローテーションを1つのコントローラで制御できるように設定した。
背骨に関しては島田氏からの要望にはなかったが、ストレッチ機能を搭載。伸び縮みできるようにしている。ただし、『センザンコウ✕サーベルタイガー』はリアル系なので、あまり伸縮させると形状が破綻するという問題があり、スライダで伸縮具合をわかるようにした。
頭と首はFKで良いというリクエストだったが、頭部が複雑だったためFKだけで制御するとデフォームが崩れる可能性があった。そこで頭と首は連動して動くコントローラの方がいいだろうと考え、福本氏の判断で回転も制御できるIKにした。
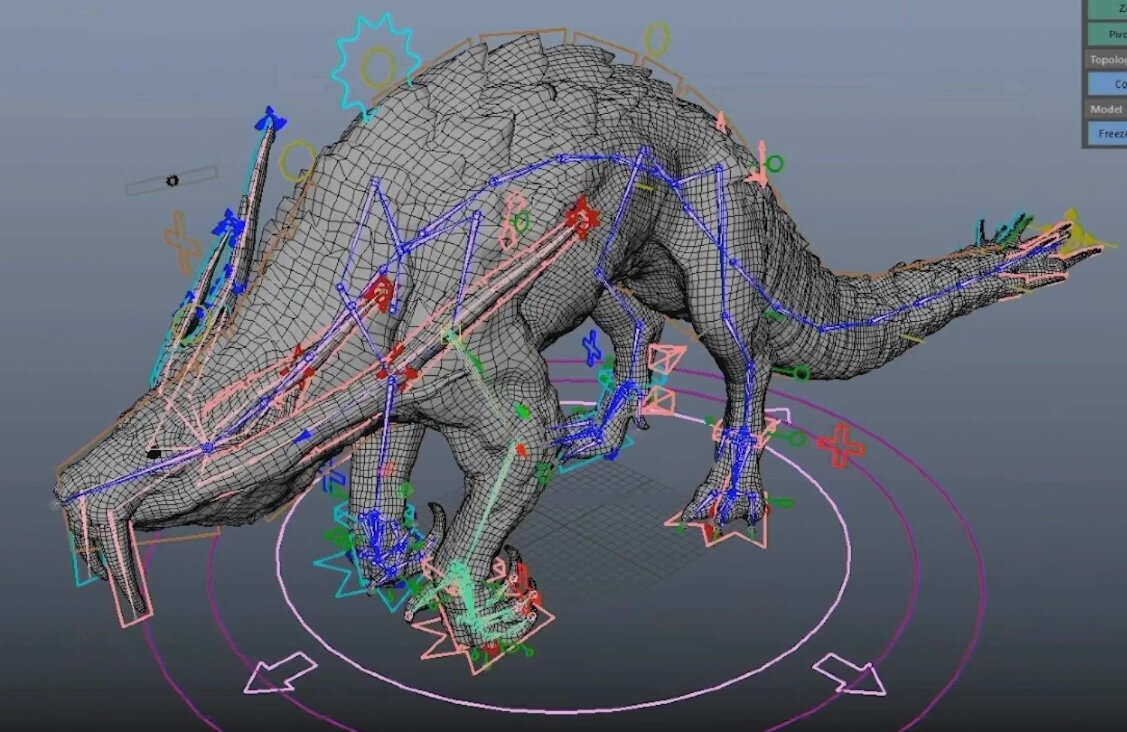
リグの詳細
-
▲背骨。上部のスライダーで伸縮具合が一目でわかる親切な設計 -
▲デフォルトではスライダーの範囲外には伸縮しないようにリミットがかけられている
-
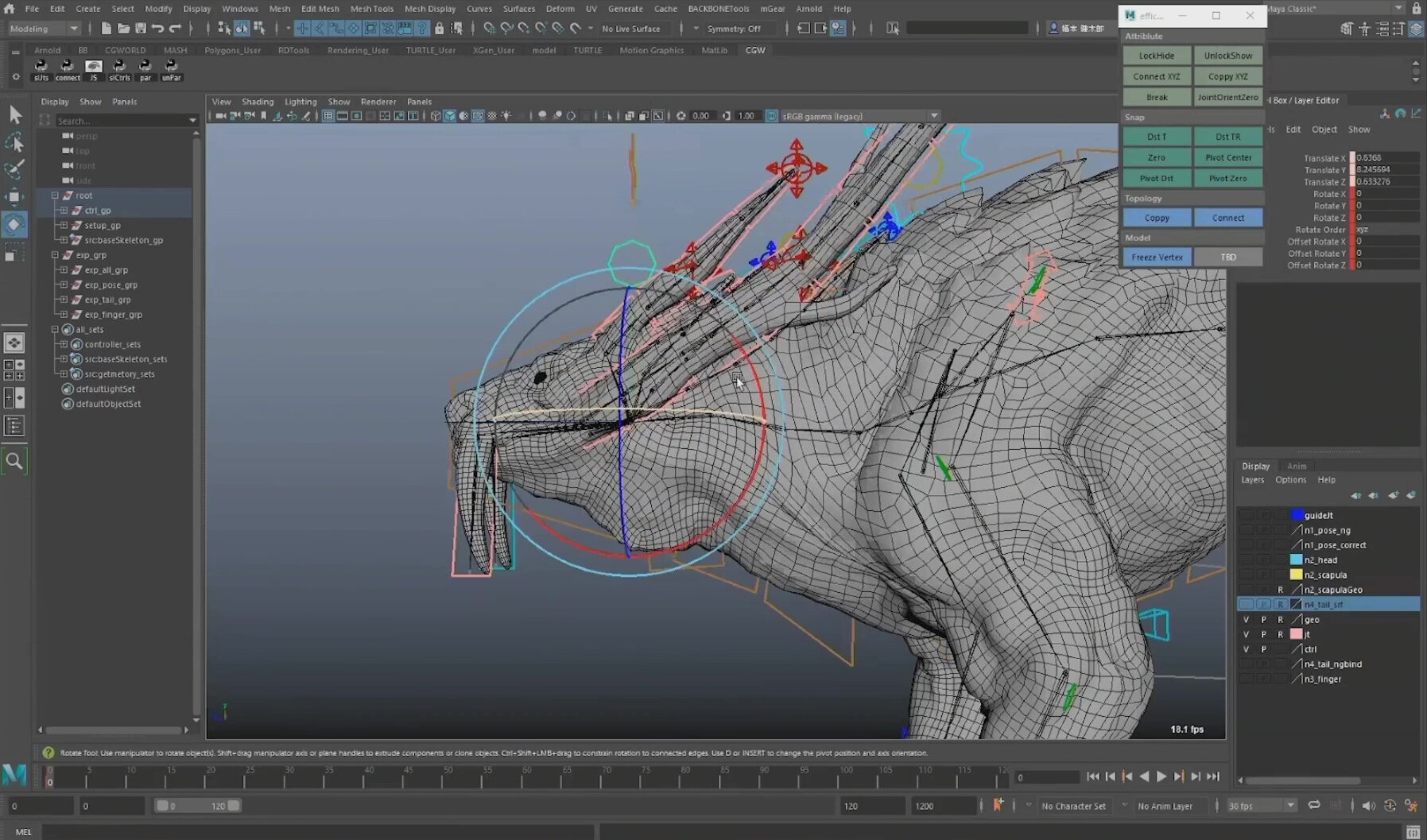
▲首 -
▲回転すると首のジョイントも連動して動くため、破綻が軽減されるしくみに。細かく制御できるようにIKに追従するFKも設定されている
-
▲両脚に関しても、福本氏の判断でスケールをかけられるように -

▲スケールはFKに切り替えた際にも引き継がれる
-
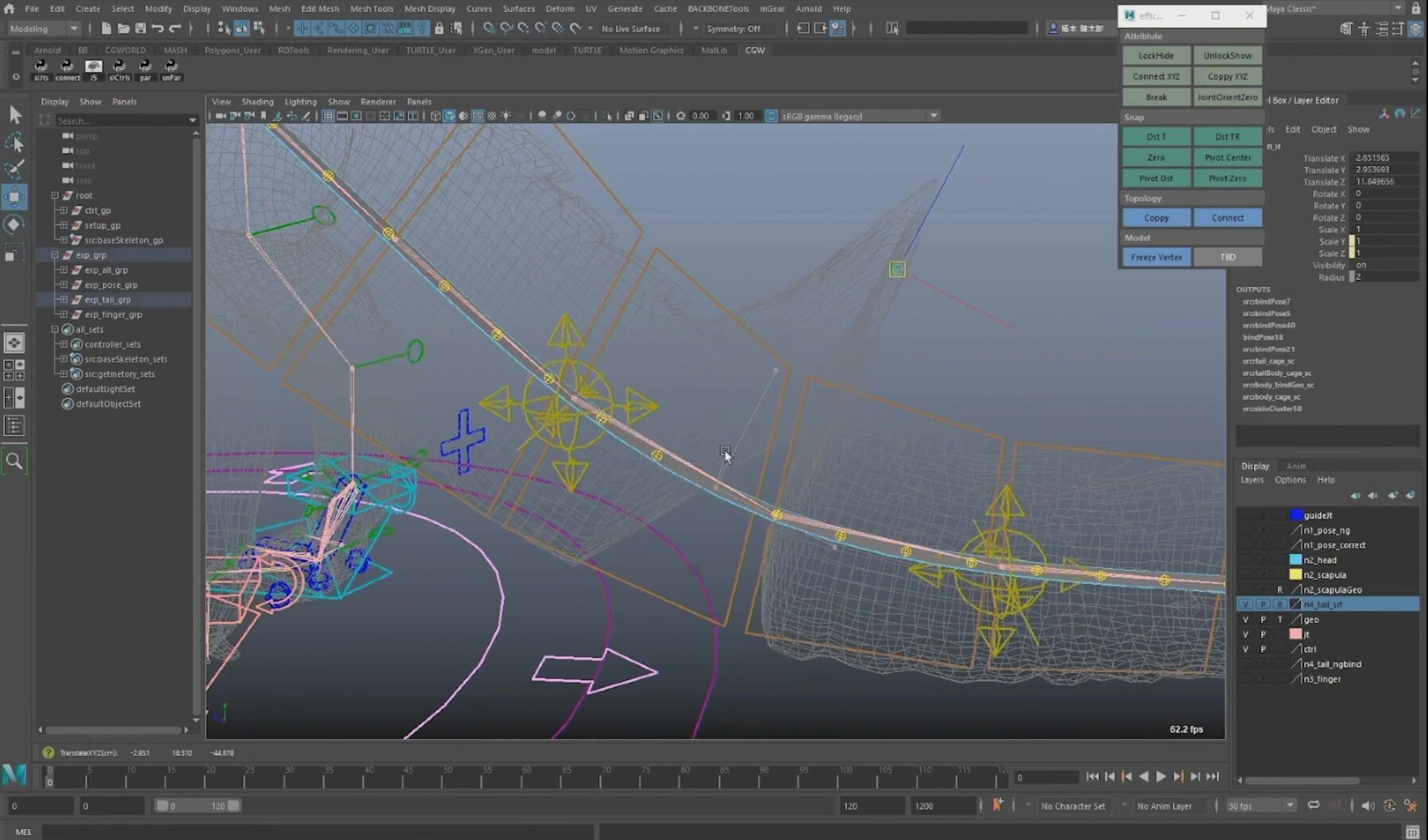
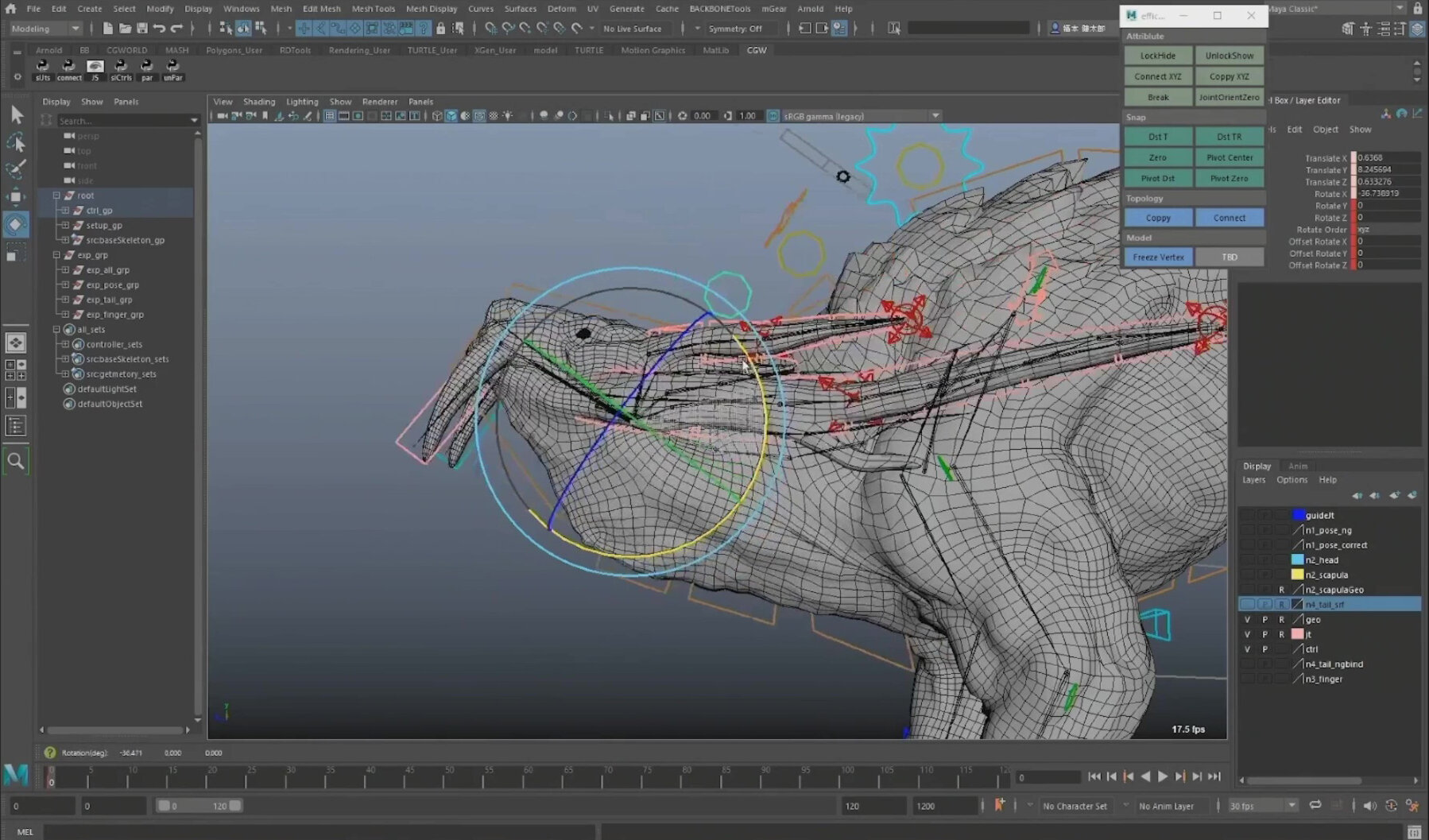
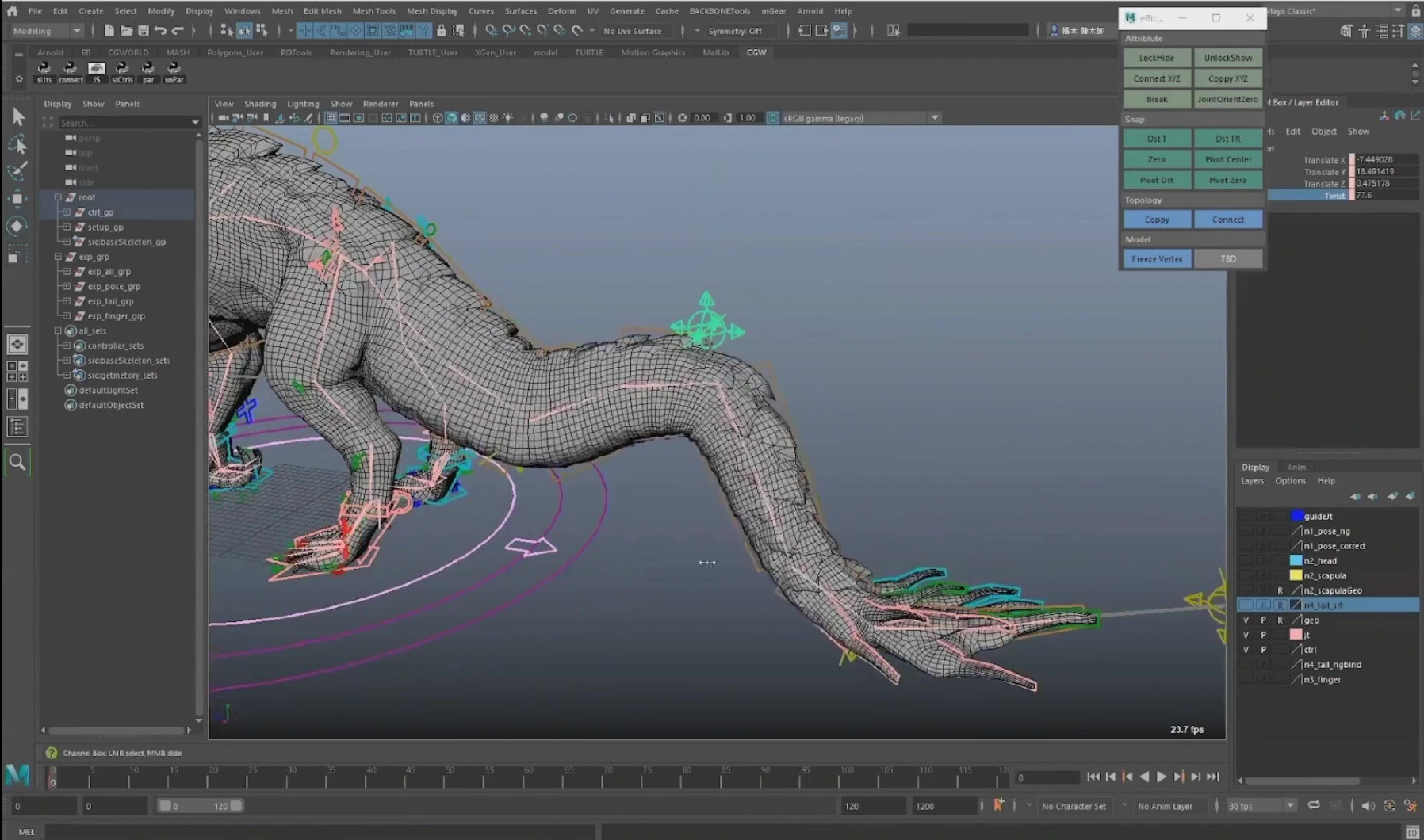
▲形状は細かい黄色い骨の部分にバインドされている。それらの骨がNURBSにドライブされ、NURBSがバインド用の骨に制御されて動くしくみだ -

▲コントローラを動かすと、NURBSの動きで変形することによって、綺麗なデフォームを再現できる



-
▲尻尾もFKでいいというリクエストだったが、尻尾で攻撃するときにツイストを多用すると考えて、FKがIKに追従するしくみを採用 -

▲尻尾も任意の箇所でツイストをかけられるように設定した
リファレンスからリアリティが生まれる
最後は、島田氏がアニメーションについて解説を行なった。森田氏や福本氏と同じように、島田氏も実在の動物のリサーチから作業を開始したそうだ。
『センザンコウ✕サーベルタイガー』は現実には存在しないクリーチャーのため、どのようなアニメーションを付けても正解ではあるものの、説得力を出すには動物を骨格的に理解し、その動きを盛り込まなければならない。

島田氏は、四足歩行の動物のアニメーションで重要になるのは、腰、胸、肩甲骨の関係性だと解説する。それらが連携して前進するため、アニメーションもその部分から取りかかり、それに付随するかたちで四つ足の動作を加えていく。
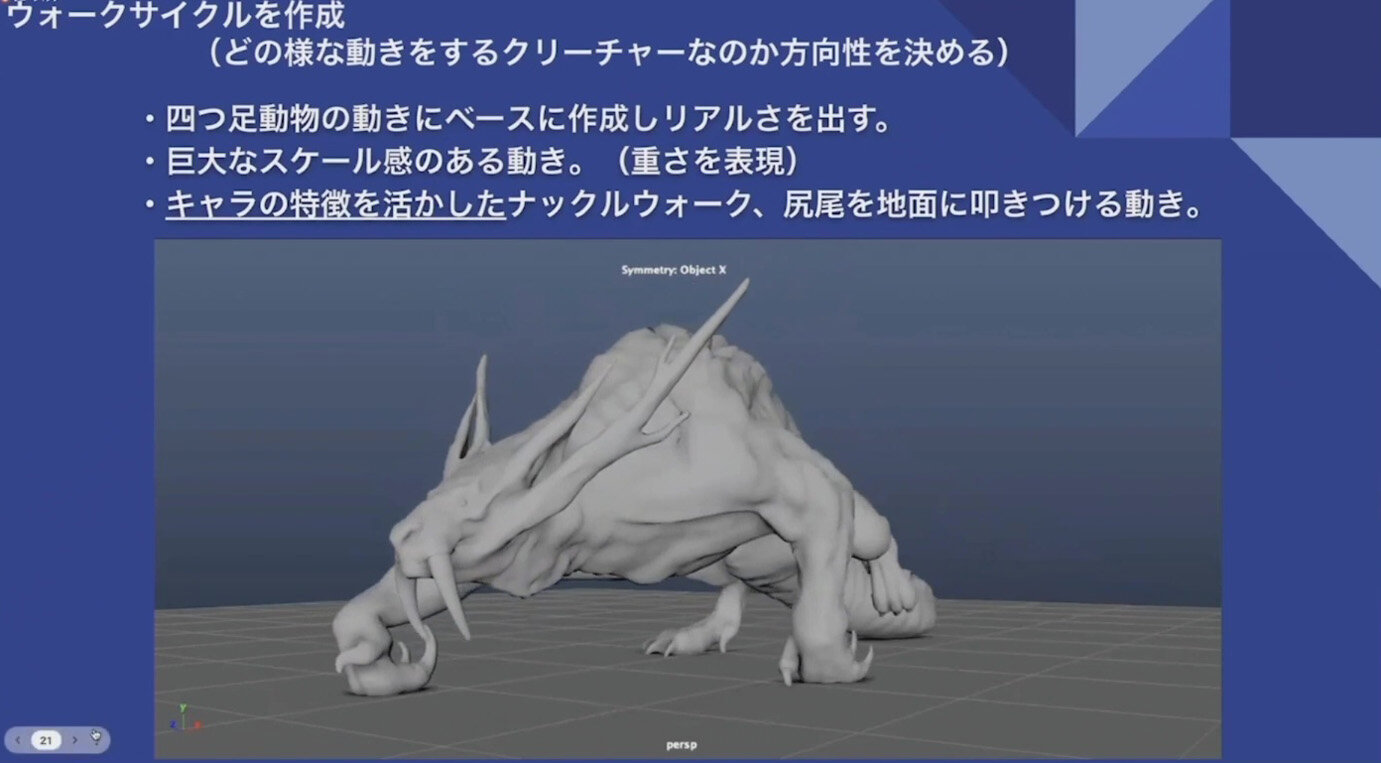
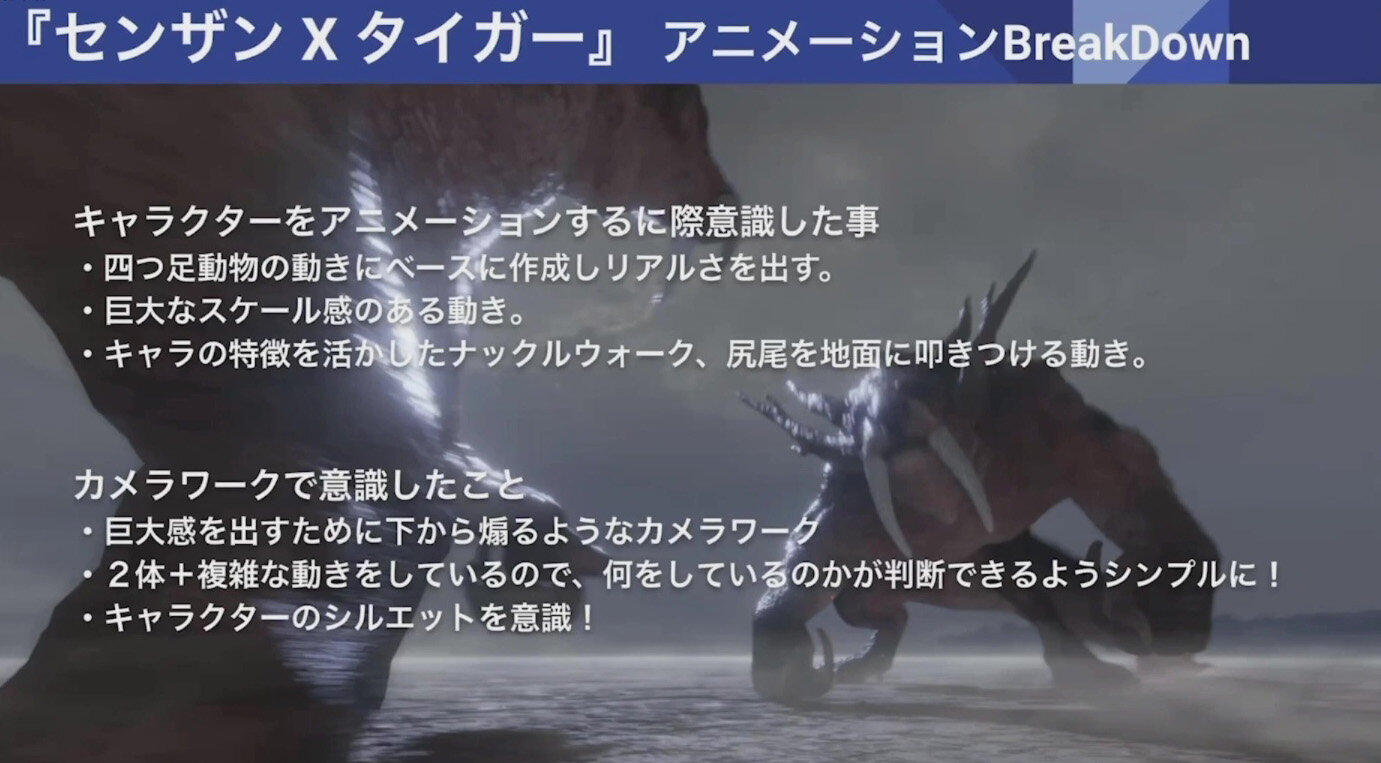
さらに重力加速度などの重さを表現する物理法則を踏まえた上で、『センザンコウ✕サーベルタイガー』の特徴であるナックルウォークや尻尾を地面に叩きつける動作を表現すれば、リアリティを担保しながらキャラクターらしさも表現することができる。
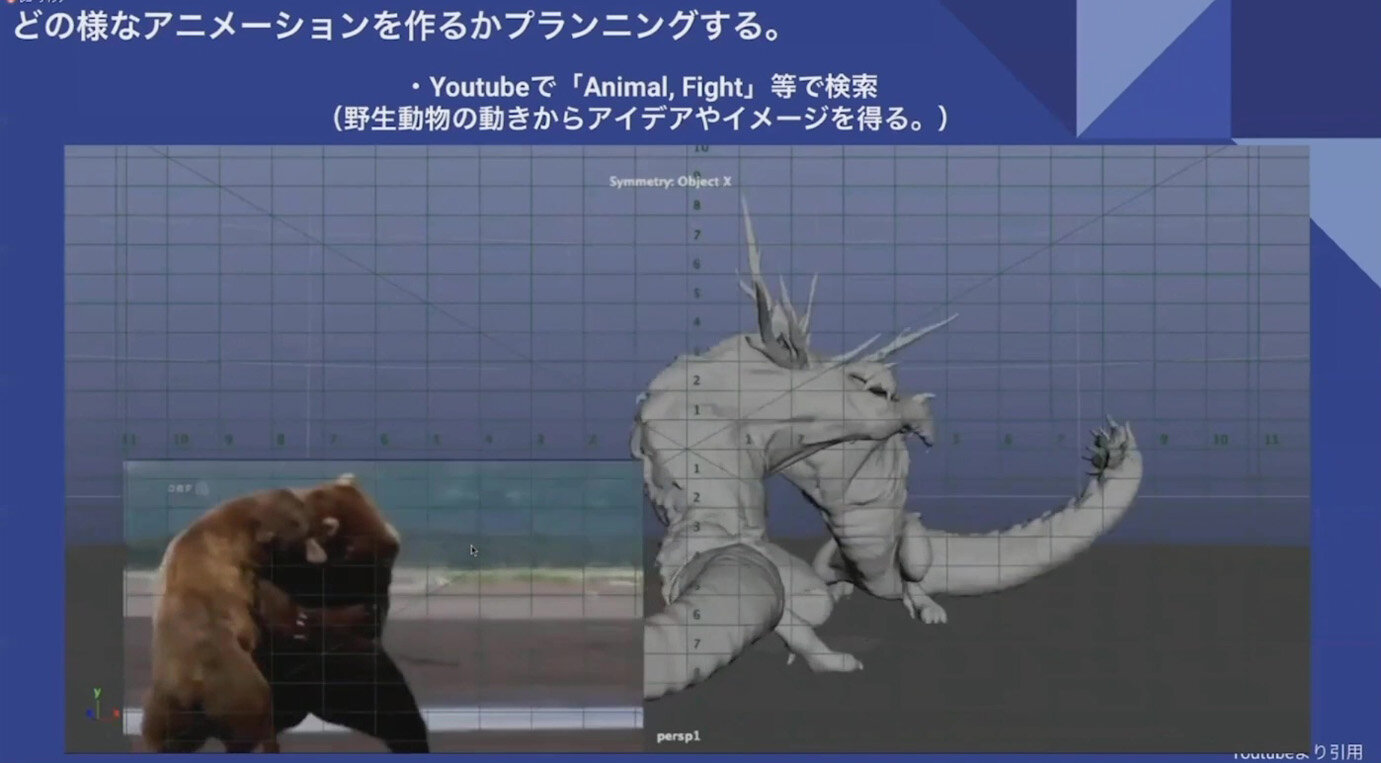
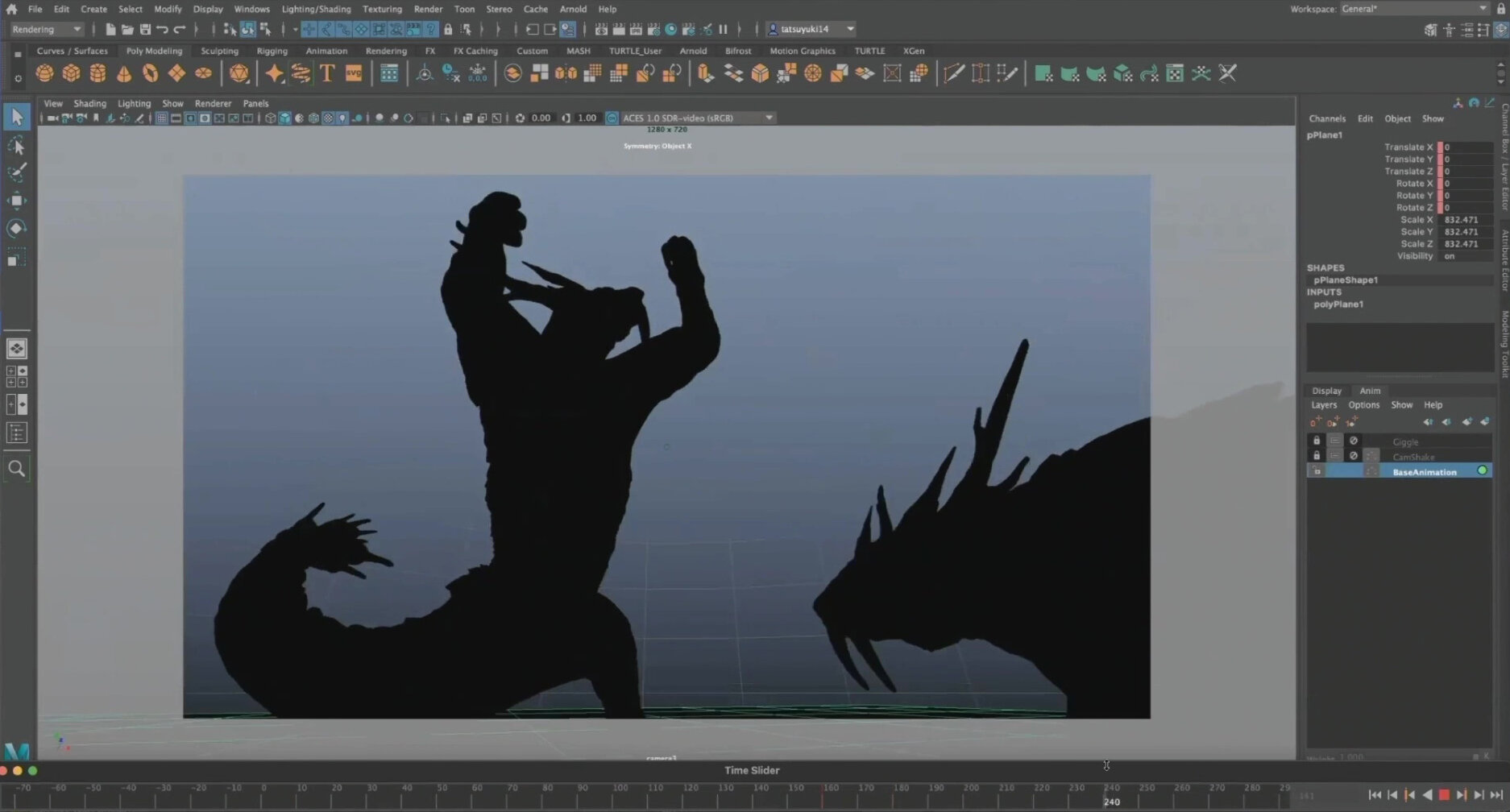
アニメーションのプランニングでは「2体の怪物を喧嘩させたい」と考えたため、野生動物が喧嘩する映像をリサーチした。ワニやライオンなど様々な動物を見たが、クマの喧嘩が最もイメージに合っていたそうだ。

アニメーションと同時並行でレイアウトの構想も練っていった。クリーチャーの巨大感を出すためにカメラは下から見上げるような位置に置き、Focal Lengthは小さめにしてパースを効かせることで迫力を出した。

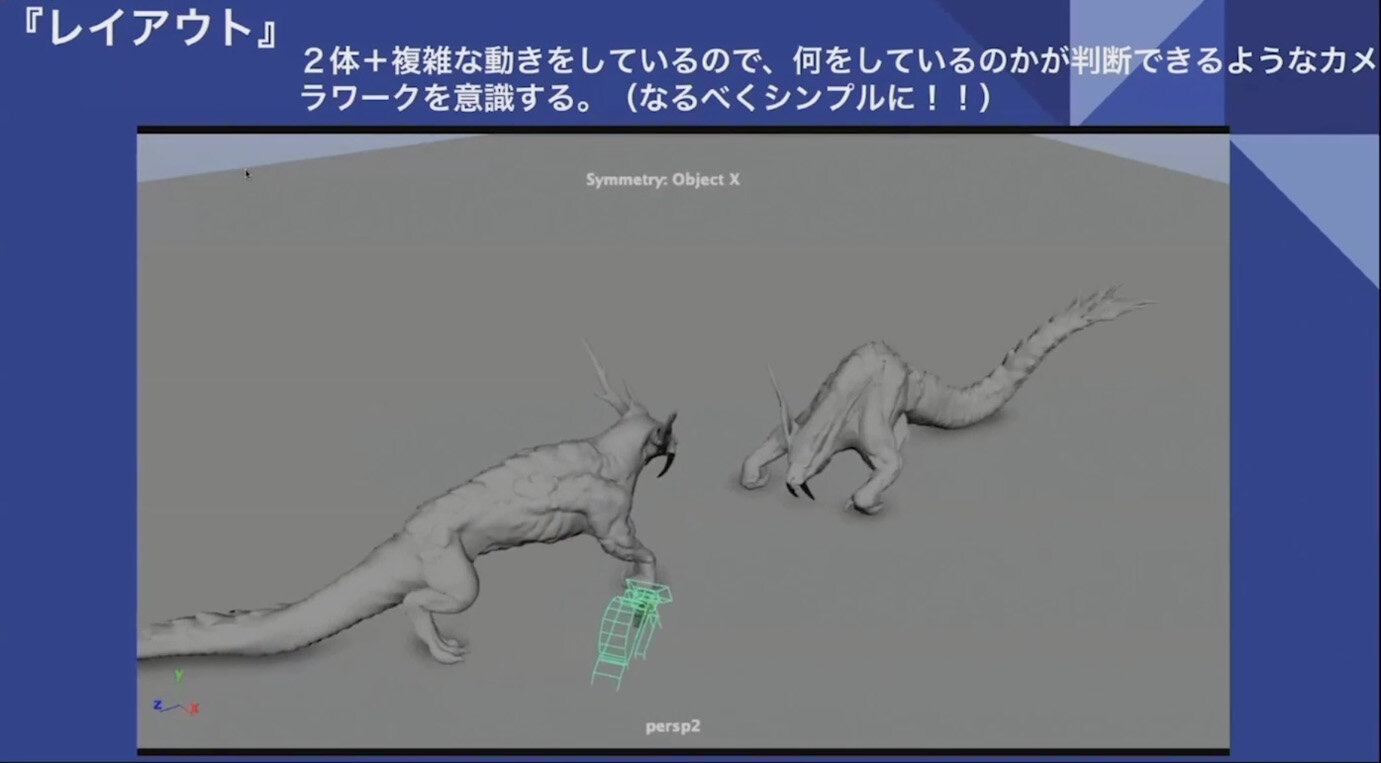
カメラワークに関しては、2体が複雑な動きをするため、何をしているのかがひと目で判断できることを意識。キャラクターと同じようにカメラまで激しく動くとわかりづらくなるため、できるだけシンプルに、状況を伝える役割に徹することにした。
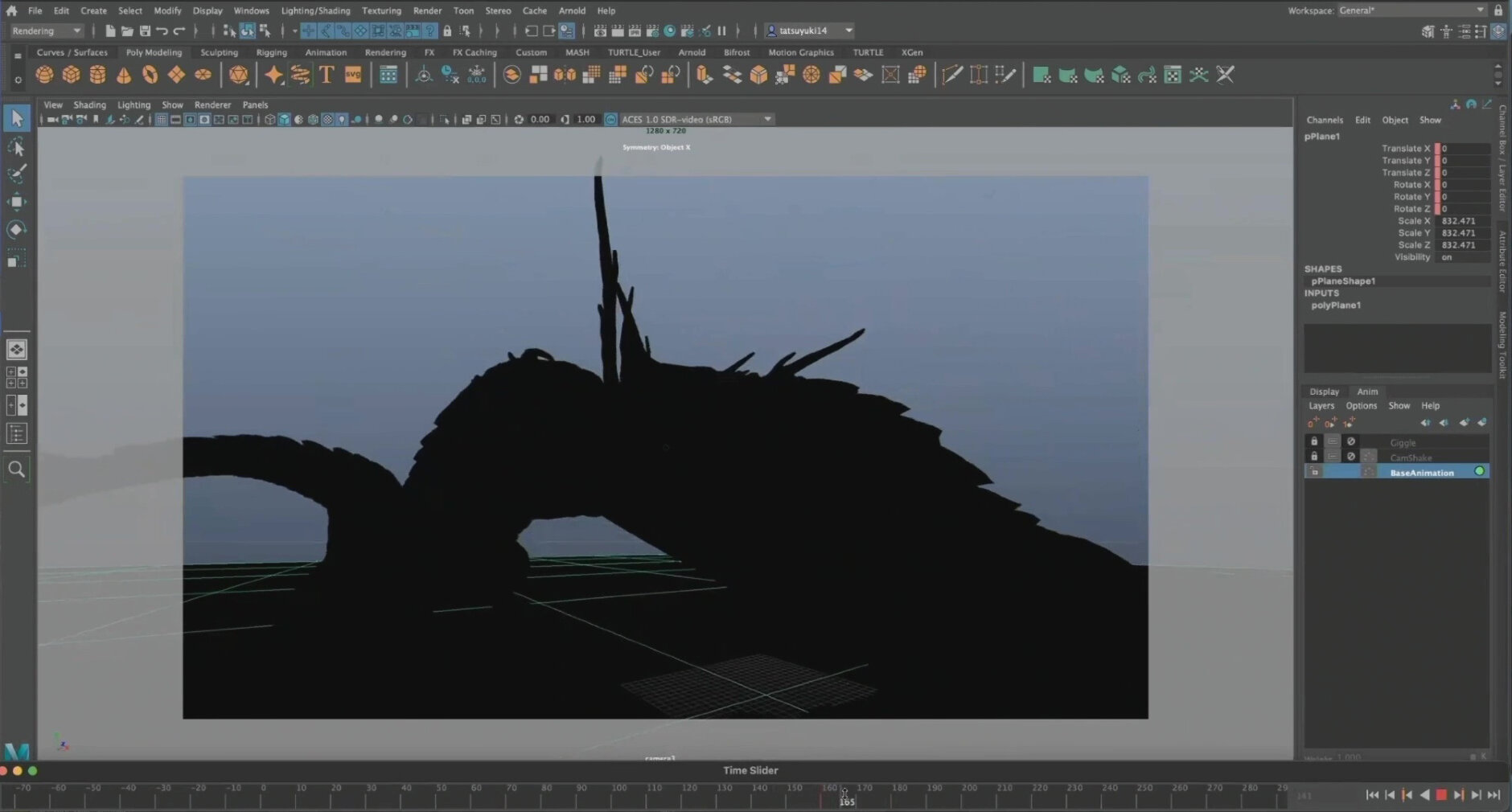
画面の視認性を高める上で、島田氏が意識したのがシルエットである。クリーチャーを黒く塗り潰した影の状態であっても、どのように動いているのかがわかるような画面づくりを心がけている。
シルエットによるアニメーションの確認

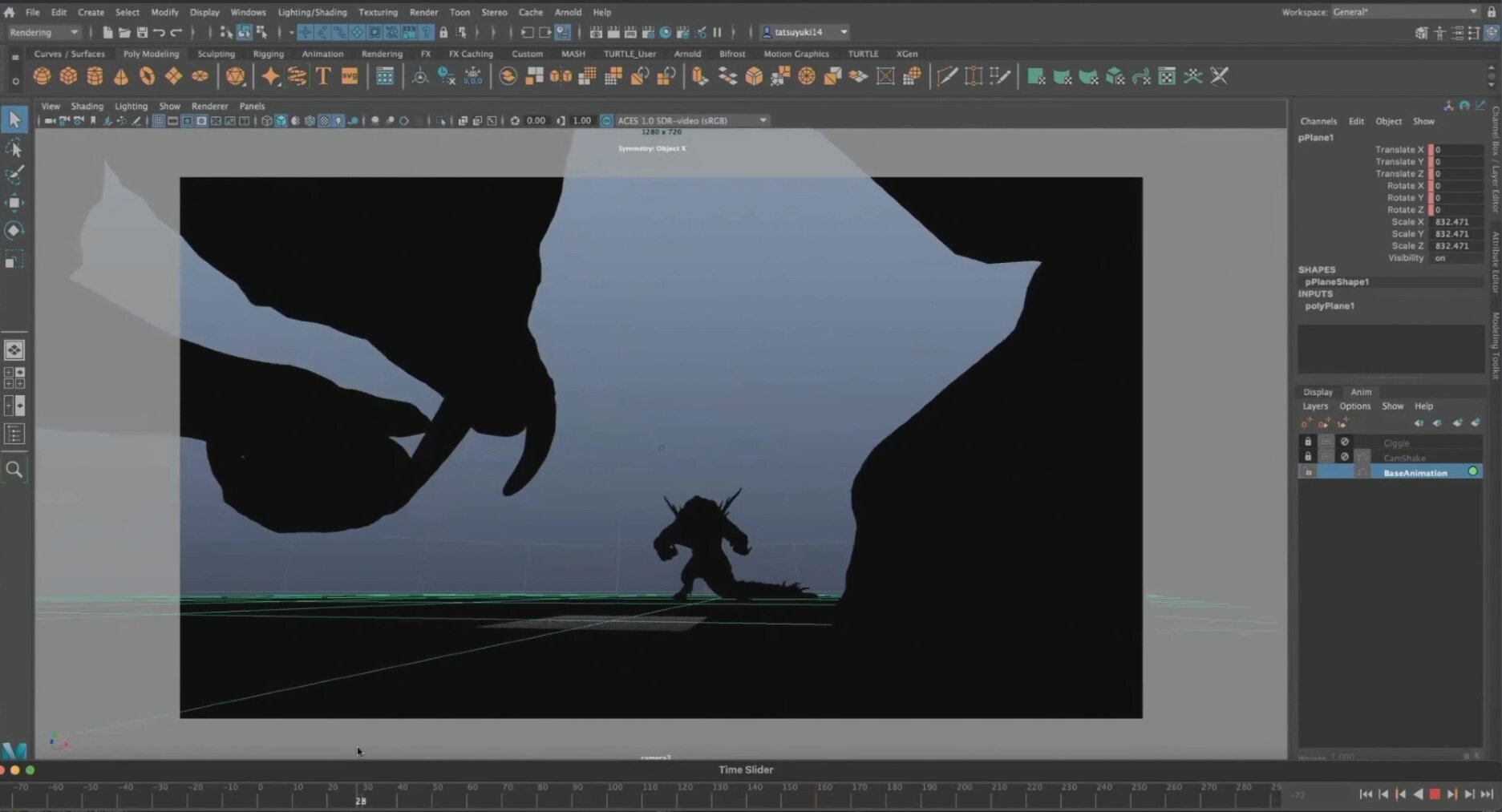

最後にカメラシェイクで画面全体にブレを加えた。ブレは攻撃がヒットする瞬間や走り出すタイミングなど、大きな動きをするときに入れることで臨場感が生まれる。

島田氏はセッションを振り返り、印象に残っていることとして、モデル担当の森田氏もリグ担当の福本氏も「本物の動物をリファレンスにしていた」という点を挙げた。『センザンコウ✕サーベルタイガー』は想像上のクリーチャーではあるが、リアルな動きをつくり出すために、いかに現実を参考にすることが大切かが、よくわかる講演となった。
TEXT_髙橋克則 / Katsunori Takahashi
EDIT_小村仁美 / Hitomi Komura(CGWORLD)、山田桃子 / Momoko Yamada