<3>ヘリコプターが飛ぶしくみ
ヘリコプターは翼が回転して揚力や推進力を生む乗りもので、飛行機の翼にあたる部分を「メインローター」と呼びます。メインローターブレードの翼断面は、飛行機の翼断面と同じような形をしています。飛行機は前に進むことで揚力を発生させて浮き上がるのに対して、ヘリコプターは自分のエンジンで翼をグルングルン回転させることで揚力を発生させます。そのため、ヘリコプターはその場で浮き上がったり、空中で静止したりすることができるということですね。
メインがあるということはサブもあるのでしょうか? 名称はサブローターではありませんが、ヘリコプターの多くには「テールローター」という小さめのローターが後ろについています。
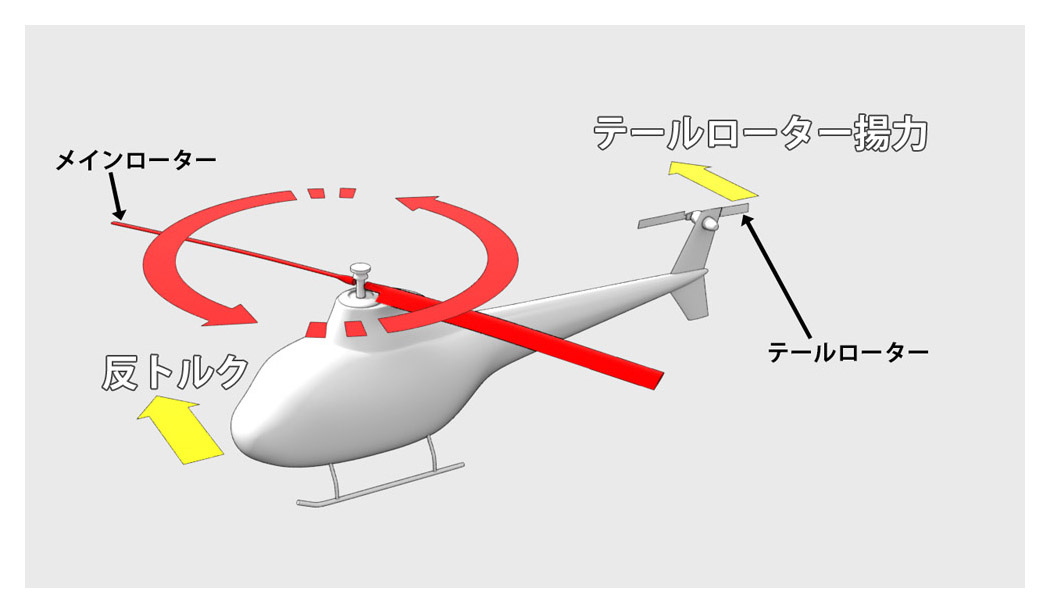
このテールローターがないとメインローターを回転させたとき、機体がメインローターの回転と逆に回ってしまいます。これを「反トルク」というのですが、それを打ち消すためにテールローターがくっついています。多くのヘリコプターはテールローターを使用して反トルクを打ち消しているのですが、中にはこのテールローターがない機体もあります。そのような場合、機体がくるくる回ってしまわないように他の手段で反トルクを防いでいます。
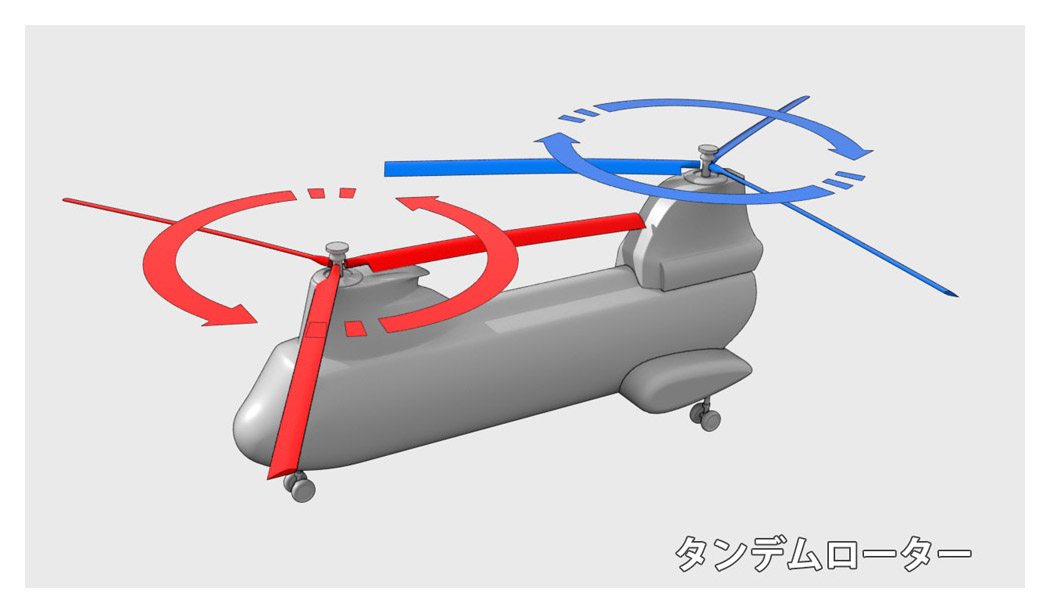
●タンデムローター
前後に2個ローターを取り付けていて、ブレードはそれぞれ逆に回転しています。
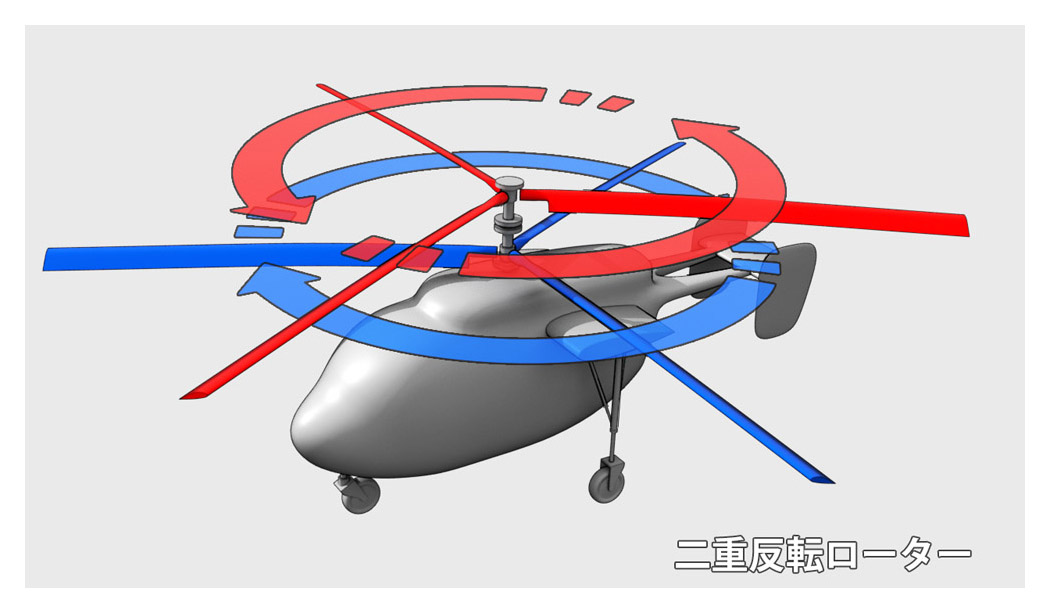
●二重反転式ローター
縦にローターを2個同軸上に配置し、それらを逆回転させることで反トルクを相殺します。これは、かさばらなくて良いですね!
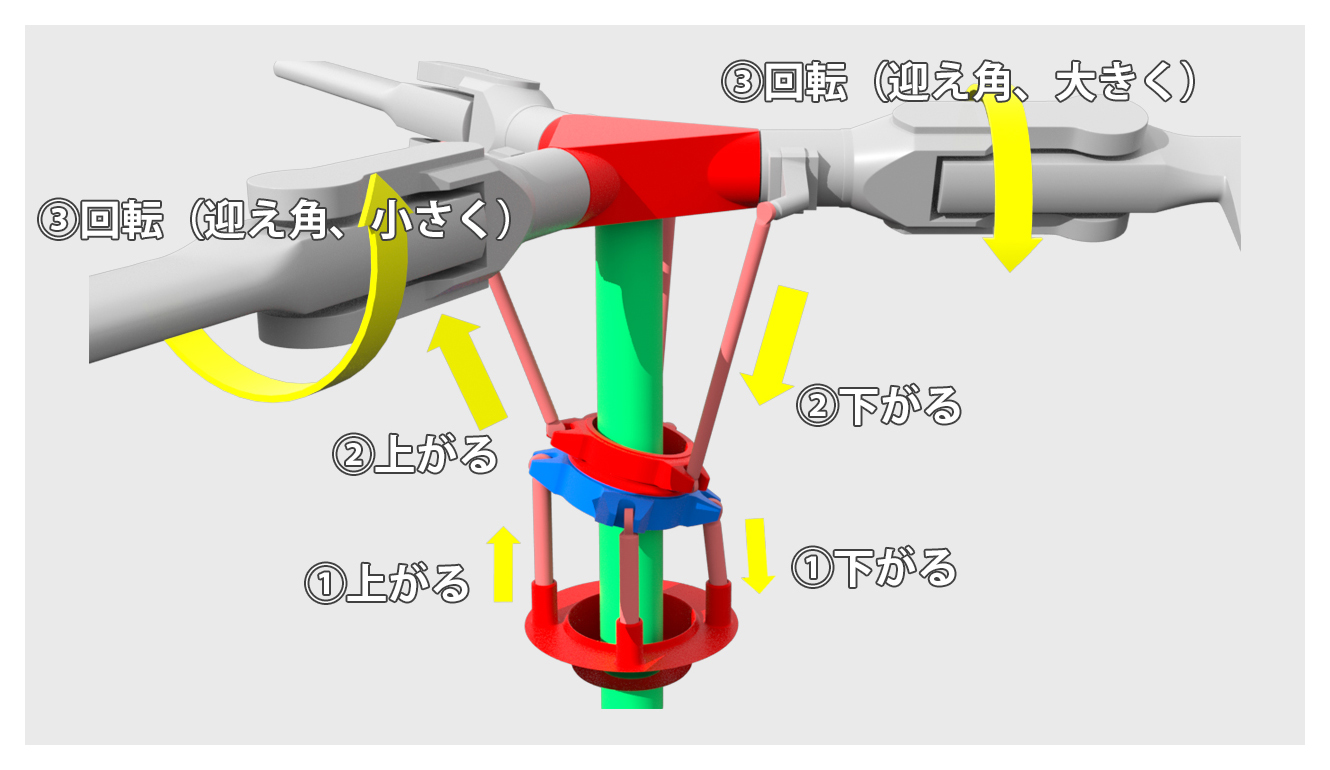
ここまで、ヘリコプターが揚力を発生させるしくみに関して説明しました。ではヘリコプターはどうやって前に進むことができるかというと、飛行機のところで説明した「迎え角」を変えることで前に進んでいるのです。どういうことかというと、ブレードが前半分にきたときより、後ろ半分にきたときの「迎え角」を大きくすれば後ろがもち上がって前に進むというわけです。
ヘリコプターはそれぞれのブレードの角度を変えることができます。というか変えられないと真上に浮かんでまた同じ場所に降りてくるだけの乗りものになってしまいます。ヘリコプターをモデリングしたことがある方は、ローターが取り付けられている部分(ローターヘッド)がごちゃごちゃしてよくわからない、と思われたのではないでしょうか? 筆者は思いました。このブレードにくっついている棒は必要なの? と。実は、この棒がブレードの角度を変えるためのものだったのです!
POINT!
オリジナルのヘリコプターをモデリングするときはどういった方式で反トルクを打ち消しているのか、ブレードの迎え角を変えられるような機構があるかどうかを考えてモデリングするとつくりやすく、良いモデルができると思います!
<4>ドローンが飛ぶしくみ
ドローンにはいろいろな形状がありますが、今回は4枚のプロペラをもつ「マルチコプター」のしくみを解説します。飛行機とヘリコプターのしくみが大体理解できたらドローンも簡単に理解できるかと思います。まず、プロペラはヘリコプターのブレード同様、断面が翼の断面と同じような形状で回転させることで揚力を得ています。
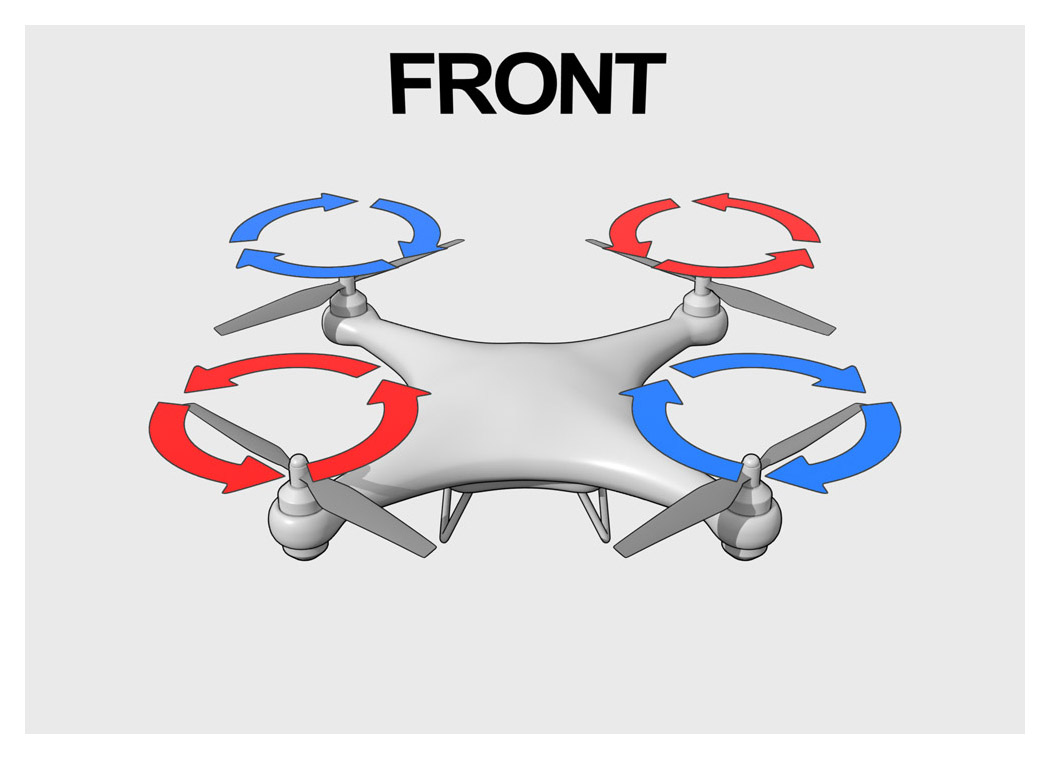
この4枚のプロペラは対角線上の2枚がそれぞれ時計回り、反時計回りと交互に回転しています。これは、ヘリコプターのときに解説した「反トルク」を打ち消すためです。
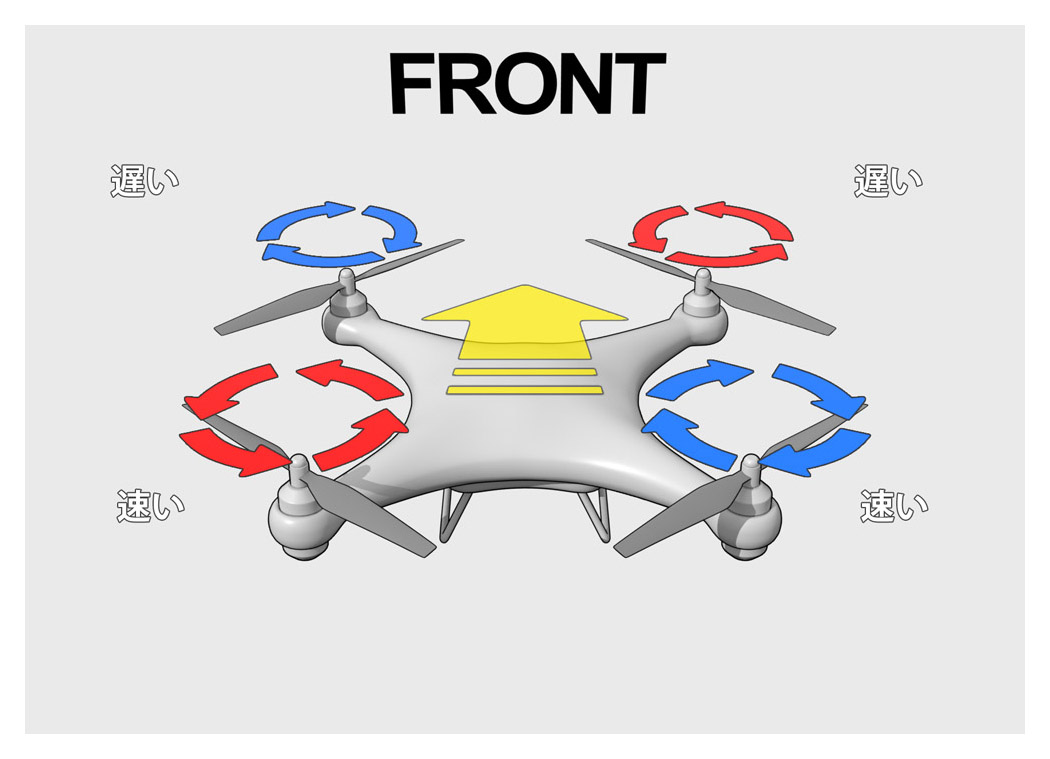
では、移動するときはどうするのでしょうか? ヘリコプターの場合は各ブレードの「迎え角」を変えることで移動をしていたのですが、このドローンの場合は4枚のプロペラの回転速度を変えることによって前後左右に進むことが可能です。前2枚の回転速度を遅く、後ろ2枚の回転速度を速くすればドローンは前に進むというわけです!
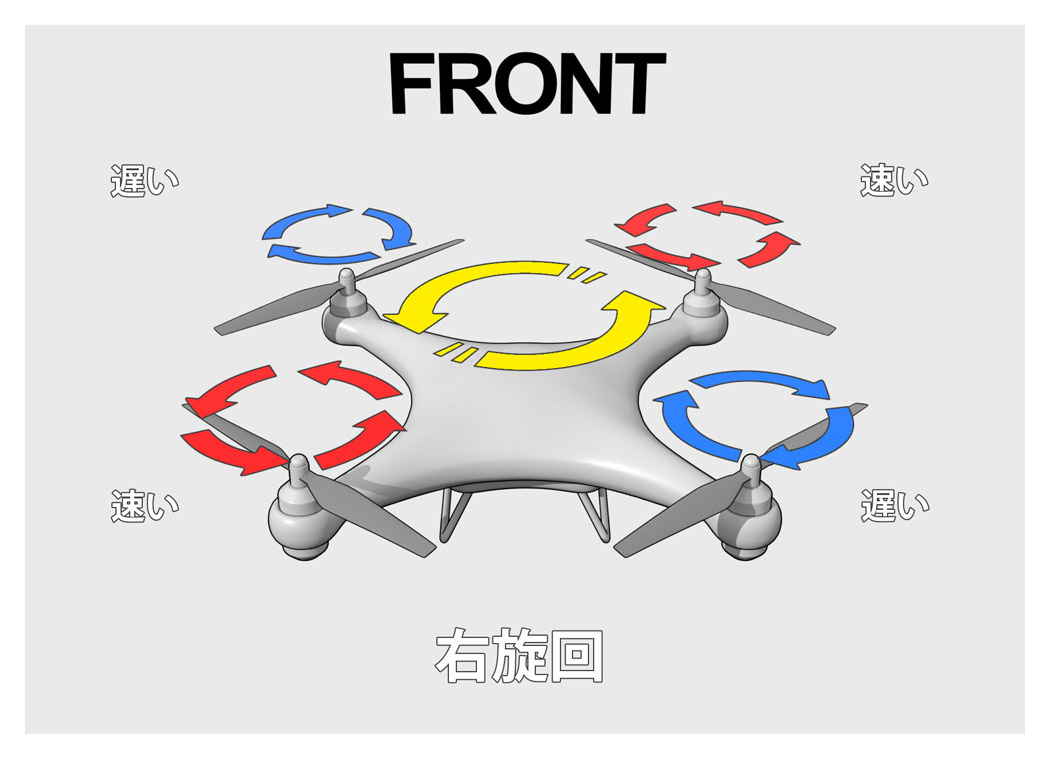
では旋回したいときにはどうするのでしょうか? 右に旋回したい時は右回転のプロペラを速く、左回転のプロペラを遅くすればOKです。意外と単純ですね。
POINT!
オリジナルのドローンをモデリングするときはローターの数が偶数であること、プロペラの断面の形状に注意しましょう。
というわけで、今回は「飛行機」「ヘリコプター」、「ドローン」の飛ぶしくみに関して勉強してみました。「揚力」「迎え角」「反トルク」の用語を覚えて使ってみてください。
次回は「黄金比・白銀比のはなし」です。黄金比といえば1:1.618ですね! その黄金比の求め方や、身近にある黄金比、白銀比のおはなしをしようと思います。それでは、次回もよろしくお願いいたします。
参考文献
書籍
「飛ぶ力学」(加藤寛一郎・著、東京大学出版会)
「機械仕掛けの神―ヘリコプター全史―」(ジェイムズ・R・チャイルズ・著、伏見威蕃・訳、早川書房)
「ヘリコプターは面白い」(宮田晋也・著、大河出版)
「飛行機技術の歴史」(ジョン・D・アンダーソン Jr.・著、織田 剛・訳、京都大学学術出版会)
Profile.
大島夏雄/Natsuo Oshima(コロビト)株式会社コロビト 代表取締役、リードモデラー
奈良県出身。多摩美術大学(絵画学科 油画専攻)を卒業後、数社のCG制作会社に所属しモデリングチーフを務める。その後、フリーとなり2009年7月2日に株式会社コロビトを設立。ゲーム、映画、アニメ、CMなど様々なジャンルの仕事を手がける
colobito.com